

An AGV obstacle avoidance method based on lidar and depth camera data fusion
A lidar and depth camera technology, applied in motor vehicles, transportation and packaging, two-dimensional position/channel control, etc., can solve the problem that robots cannot cope with complex environments well, the obstacle avoidance scheme is single, and there is no avoidance. It can improve the ability of identification and avoidance, ensure safety, and reduce hardware costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
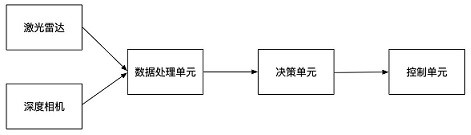
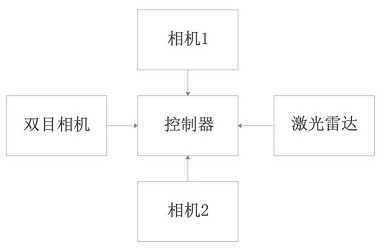
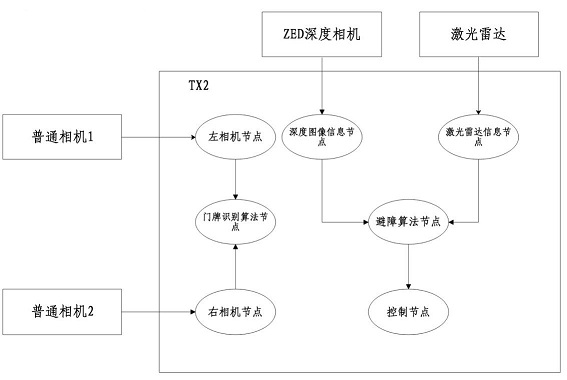
[0044] Such as Figure 1-3 As shown, an AGV obstacle avoidance method based on lidar and depth camera data fusion, including a controller installed on the AGV for data processing, the controller uses the NVIDIA Jetson TX2 control board, and the controller is equipped with data processing unit, decision-making unit and control unit; the modeling platform of NVIDIA Jetson TX2 control board is Ubuntu operating system.
[0045] It also includes the lidar installed on the AGV to monitor the surrounding environment and the hardware equipment that can obtain depth images and point cloud images. The hardware equipment for depth images and point cloud images includes scanning and tracking obstacles in the direction of AGV travel installed on the front of the AGV The depth camera, and the ordinary camera installed on the AGV to collect house number images; the laser radar, depth camera and ordinary camera are respectively connected to the controller signal for signal transmission;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More