Intelligent control method for dolphin motion stability of high-speed amphibious vehicle
A technology of dolphin movement and intelligent control, applied in special data processing applications, instruments, electrical and digital data processing, etc., can solve problems such as poor controllability, limited adjustment ability, adverse effects on vehicle performance, etc., achieve simple and intelligent forecasting, and improve control. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
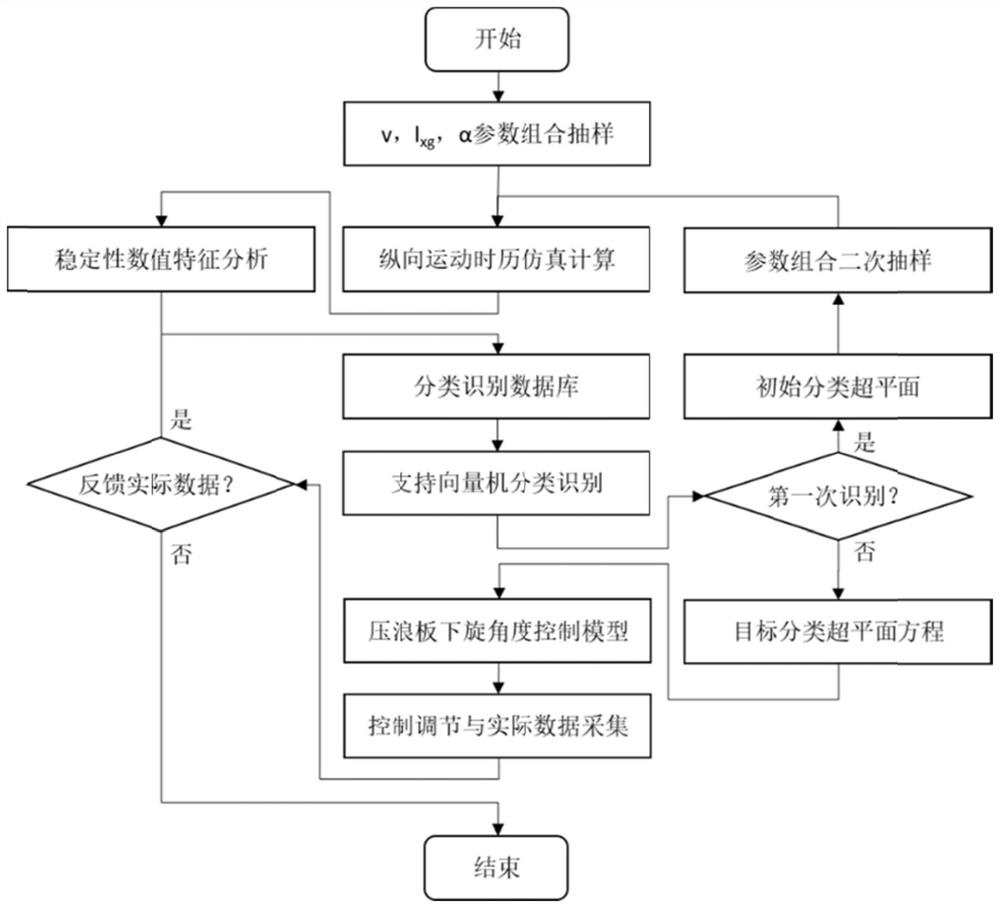
[0044] Such as figure 1 The schematic flow chart of the intelligent control method for the motion stability of the high-speed amphibious vehicle dolphin is shown. xg and the parameter combination of the wave pressure plate downswing angle α to sample, and calculate the corresponding vehicle longitudinal motion time history, give the above parameter sample points different numerical characteristics according to the stability of the motion time history, and form a classification identification database; then use The support vector machine classification recognition algorithm determines the boundary between the stability and instability of the longitudinal motion of the vehicle, that is, the target classification hyperplane, and constructs the control model of the downspin angle of the wave breaker during navigation according to the target hyper...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap