

Quadruped robot motion planning method based on hierarchical reinforcement learning
A robot motion, quadruped robot technology, applied in the field of quadruped robot motion planning based on hierarchical reinforcement learning, can solve the problem that the quadruped robot control strategy cannot effectively balance the complex environment exploration ability and the fuselage stability, and the coordination cannot be directly effective Ground coordination and other issues to achieve good environmental generalization effect, good control stability, and the effect of maintaining the fuselage posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below with reference to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the present invention.
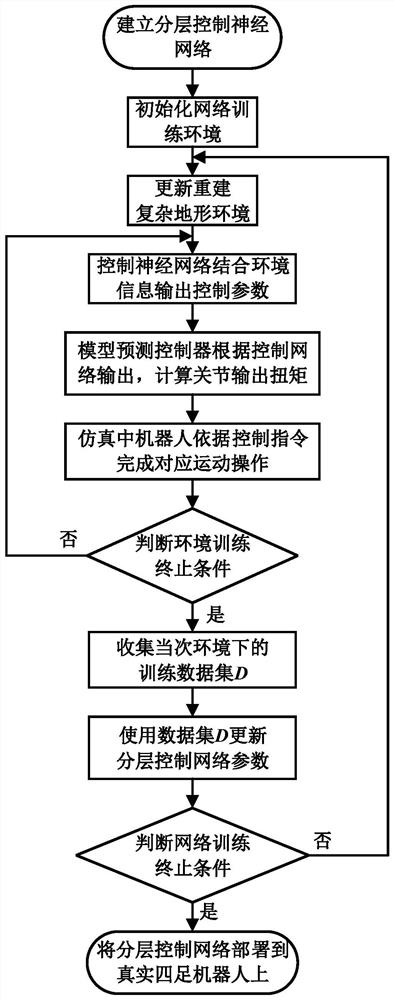
[0033] Such as figure 1 As shown, the quadruped robot motion planning method based on layered reinforcement learning of the present invention specifically includes the following steps:
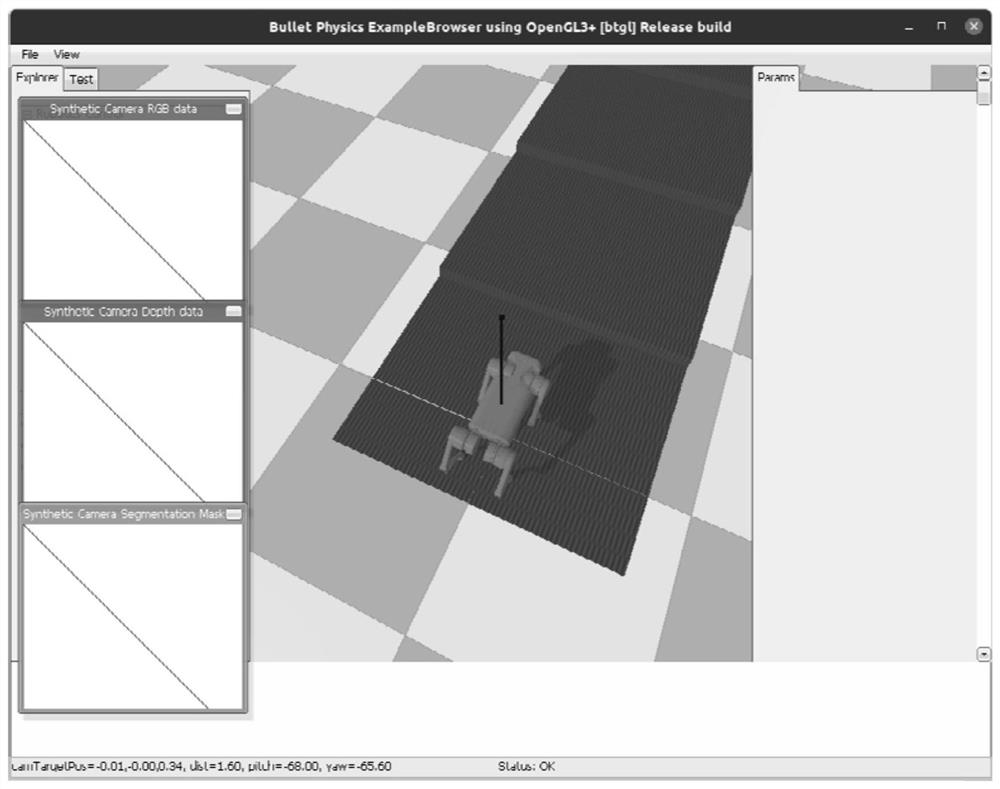
[0034] Step 1: Build a quadruped robot virtual simulation environment with neural network training capabilities on the simulation platform, and build a layered control network, including the upper layer control neural network and the lower layer model predictive controller. The upper-layer neural network is responsible for decision-making and planning the attitude and position of the robot during the movement process, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More