

Visual servo-based illegal aircraft strike method and robot
A visual servo and aircraft technology, applied in the direction of instruments, non-electric variable control, control/regulation systems, etc., can solve civil aviation, sensitive targets and major event safety hazards, illegal aircraft intrusion cannot be early warning, interference with public order, etc. problems, to achieve the effects of wide coverage area, lower deployment and maintenance costs, and labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
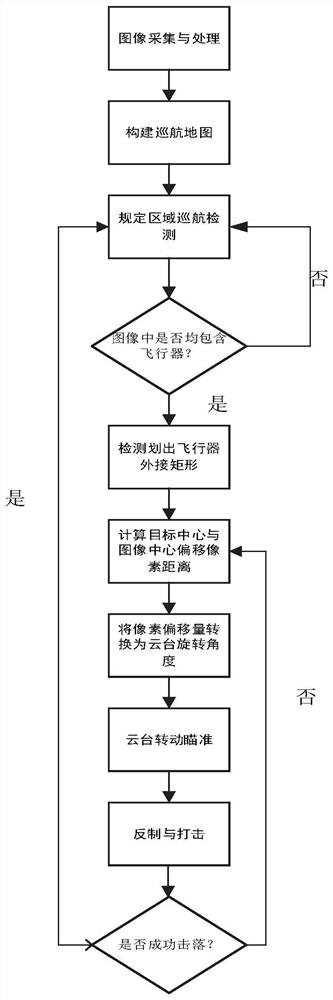
[0033] In order to realize the automatic inspection of illegal aircraft, and the positioning, tracking and combating of illegal aircraft during the automatic inspection process, a method for combating illegal aircraft based on visual servoing is disclosed in this embodiment, including:
[0034] During the automatic cruising process of the robot, the inspection image is collected;
[0035] Judging whether there are illegal aircraft in the collected inspection images;
[0036] When it is judged that there is an illegal aircraft in multiple frames of continuous inspection images, control the rotation of the gimbal to locate and track the illegal aircraft;
[0037] After the gimbal can stably track the illegal aircraft, activate the striking device to attack the illegal aircraft.
[0038] Further, the collected inspection images are input into the trained detection network model to judge whether there are illegal aircraft in the inspection images.
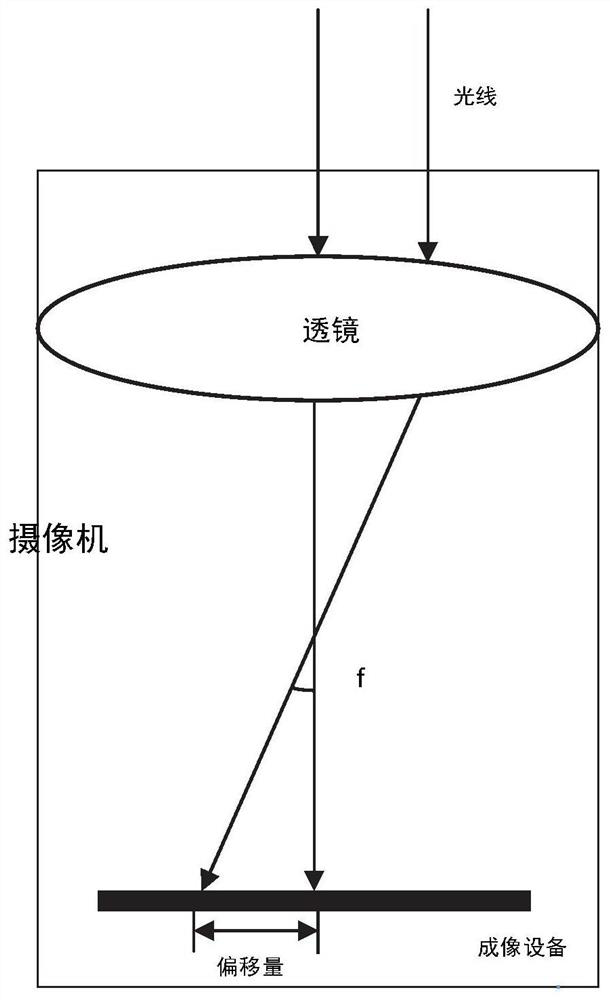
[0039] Further, by calculatin...
Embodiment 2
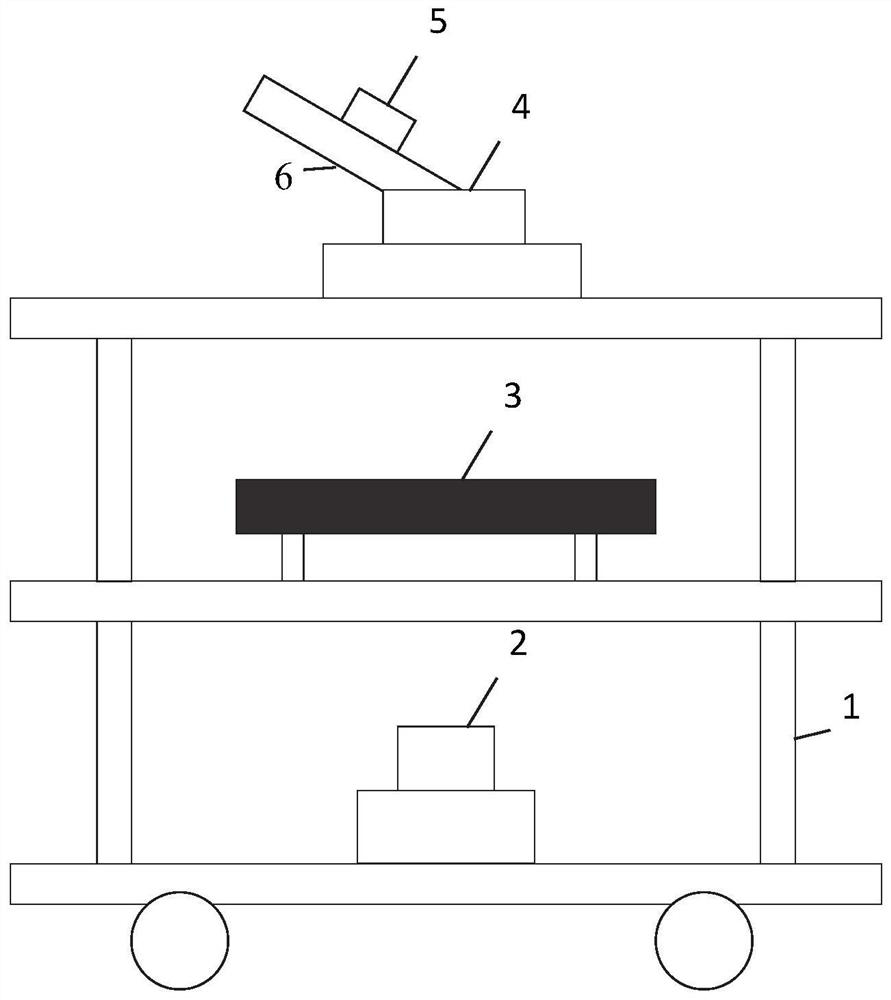
[0054] In this embodiment, a visual servo-based strike robot for illegal aircraft is disclosed, including: a mobile chassis, a pan-tilt and a host computer mounted on the mobile chassis, a fixed image acquisition device and a strike device on the pan-tilt, an image capture device and a strike The device rotates with the gimbal;
[0055] An image acquisition device, used for collecting inspection images and inspection images;
[0056] Strike device, used to strike illegal aircraft;
[0057] The upper computer is used to control the movement of the mobile chassis. During the movement, it judges whether there is an illegal aircraft in the collected inspection image. When it is judged that there is an illegal aircraft in the inspection image, it controls the rotation of the gimbal. Positioning, tracking and combating the illegal aircraft.
[0058] Such as image 3 As shown, a visual servo-based illegal aircraft strike robot includes: a mobile chassis 1, on which a radar 2, a cl...
Embodiment 3
[0063] In this embodiment, an electronic device is disclosed, including a memory, a processor, and computer instructions stored in the memory and executed on the processor. When the computer instructions are executed by the processor, a method disclosed in Embodiment 1 is completed. The steps described in a method for striking illegal aircraft based on visual servoing.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More