

Collaborative robot nonlinear stiffness modeling method
A modeling method, robot technology, applied in the direction of instruments, electrical digital data processing, geometric CAD, etc., can solve the influence of stiffness. There are few studies, and the flexibility of robots cannot be fully considered, and the influence of nonlinear stiffness of collaborative robots has not been seen. Research and other issues to achieve the effect of improving the rigidity and positioning accuracy of the whole machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be described in further detail below in conjunction with the accompanying drawings.
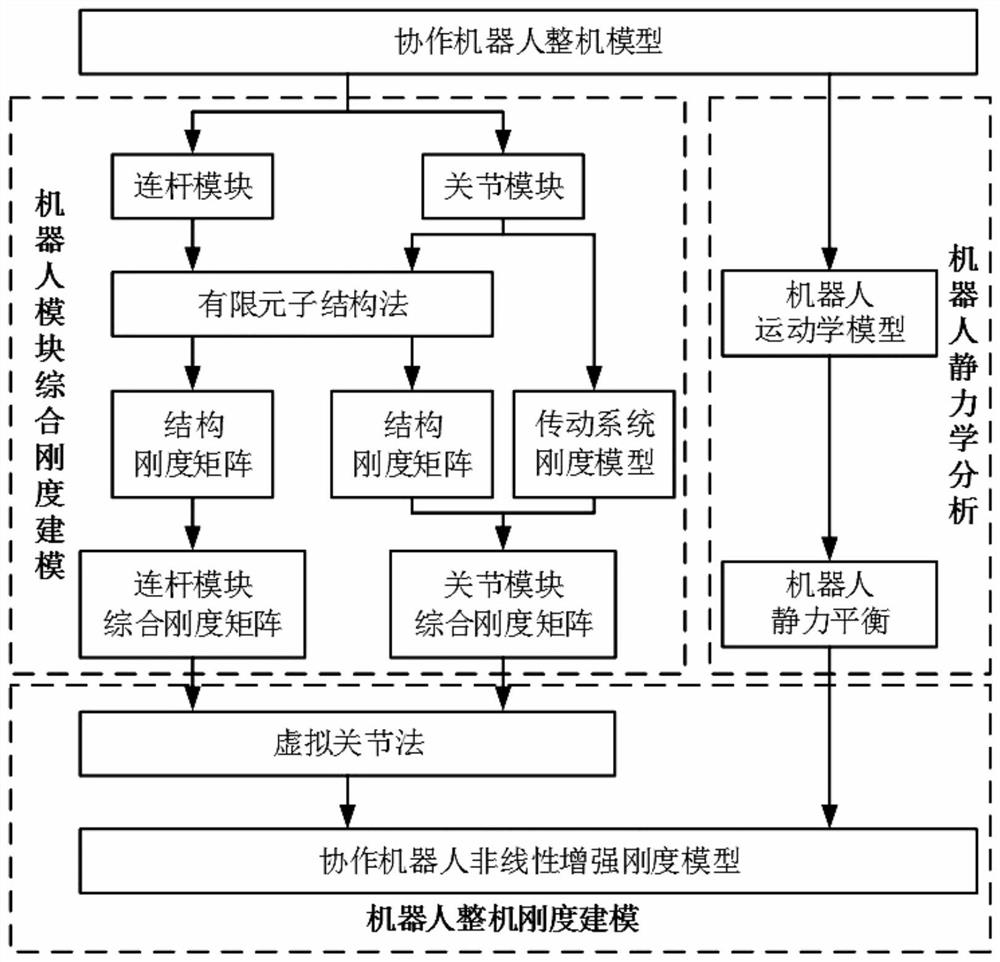
[0084] Such as figure 1 Shown, the concrete steps of the present invention are as follows:
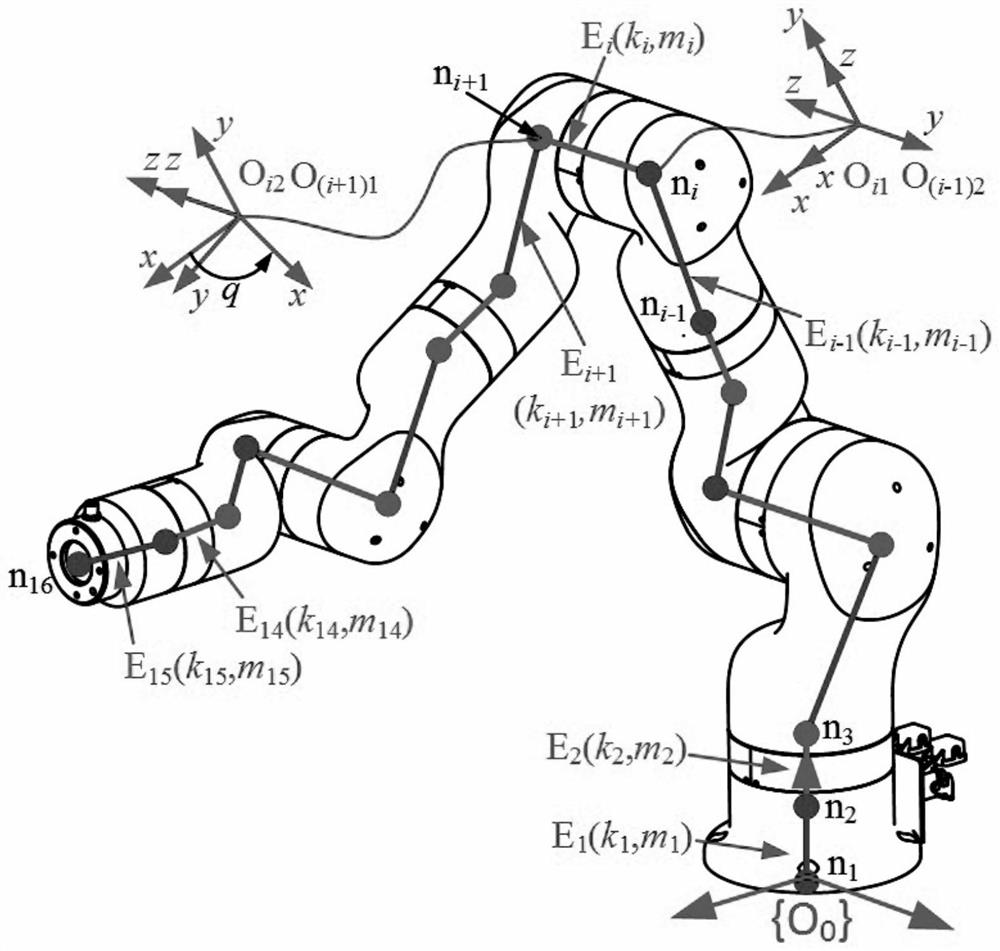
[0085] Step 1: Model the comprehensive stiffness of the robot module, split the robot into multiple independent link modules and joint modules, and use the finite element substructure method to obtain the structural stiffness matrix of each module Then carry out the nonlinear modeling of the robot transmission system to obtain the nonlinear stiffness of the robot transmission system The overall comprehensive stiffness of the robot is the sum of the comprehensive stiffness of each module, and the comprehensive stiffness matrix of the connecting rod module is the structural stiffness matrix The joint module stiffness matrix is the structural stiffness matrix and the nonlinear stiffness of the robot transmission system synthesis at the output.
[0086] This s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More