Artificial intelligence system and method serving power robot
An artificial intelligence and robotics technology, applied in the field of artificial intelligence systems, can solve the problems of limiting the intelligence of electric robot systems, the error between the end position of the robotic arm and the actual working position, and disorderly development, so as to achieve comprehensive perception and precise operation, The effect of improving data transmission efficiency and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
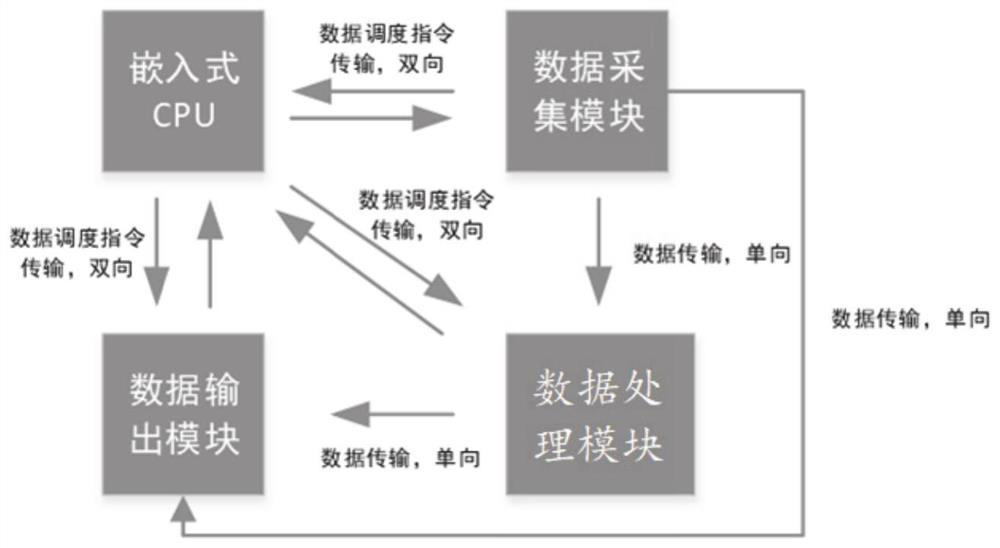
[0082] According to an embodiment of the present invention, an artificial intelligence system serving electric robots is provided, referring to figure 1 ,include:
[0083] The embedded CPU module is configured to send data scheduling instructions to the data processing module;
[0084] The data processing module is configured to intelligently process the received data based on the received data scheduling instruction;
[0085] The data acquisition module is configured to receive the data scheduling instruction of the embedded CPU module, and transmit the collected power data to the data processing module and / or the data output module in one direction;
[0086] The data output module is configured to receive the data scheduling instructions of the embedded CPU module, and realize the output of data processing results or collected data.
[0087] Only data scheduling instructions are transmitted between the embedded CPU module and the data acquisition module, data calculation m...
Embodiment 2
[0189] According to an embodiment of the present invention, an embodiment of an electric robot system is disclosed, including: an electric robot body and the artificial intelligence system described in Embodiment 1; Front-end processing of data.
[0190] For the specific implementation process of the artificial intelligence system, refer to the solution disclosed in Embodiment 1, and details are not repeated here.
Embodiment 3
[0192] According to an embodiment of the present invention, an embodiment of an artificial intelligence method serving an electric robot is disclosed, including:
[0193]Based on multi-sensor fusion information, realize the intelligent construction of three-dimensional semantic map of the target area and obstacle identification;
[0194] Based on the constructed 3D semantic map, realize the path planning of the electric robot;
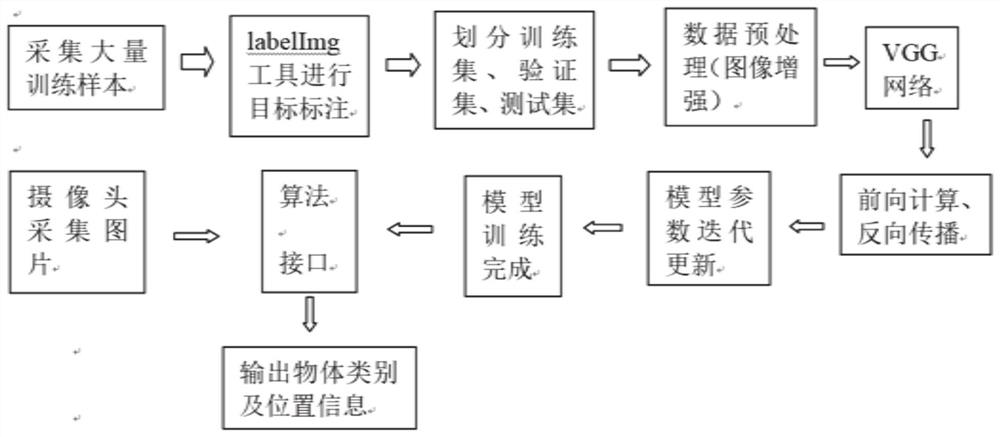
[0195] Based on the acquired image information of the power equipment, the defect identification and position detection of the target equipment are realized;
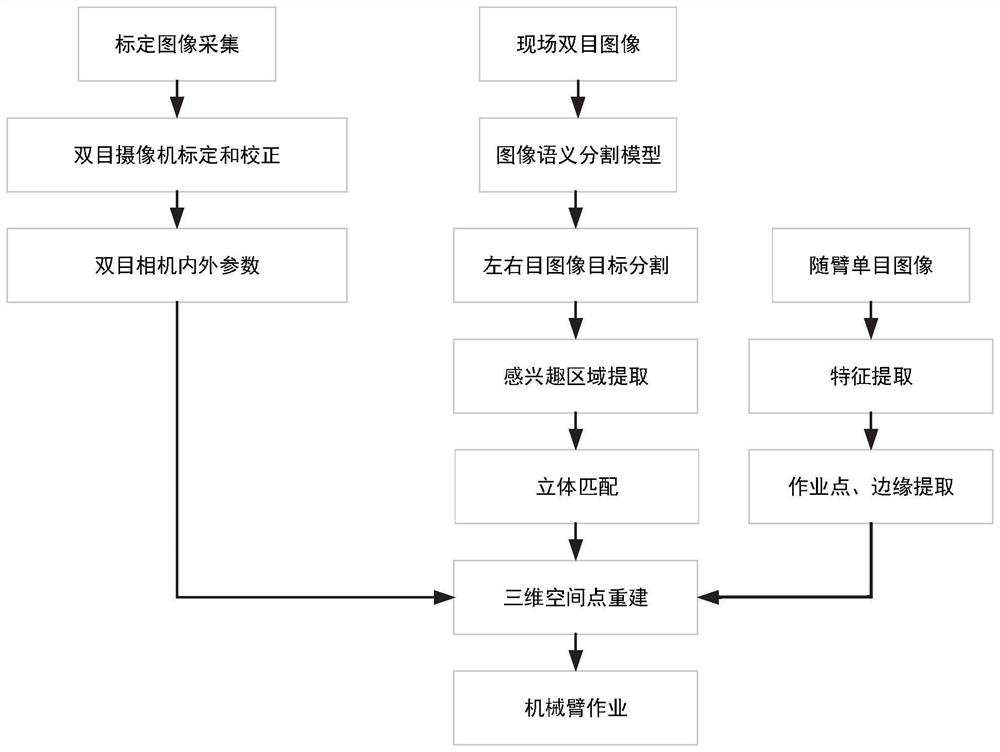
[0196] The precise operation of the electric robot manipulator is automatically realized based on the detected target position.
[0197] The specific implementation process of the above method has been described in the first embodiment, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com