

Robot capable of jumping and sliding on water surface
A technology of a robot and an adjustment mechanism, applied in the field of robots, can solve the problems of low motion efficiency, unachieved bionic goals, and single motion form, and achieve the effects of reducing mass, improving energy release efficiency, and expanding motion space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0037] The present invention will be described in detail below with reference to the accompanying drawings and examples.
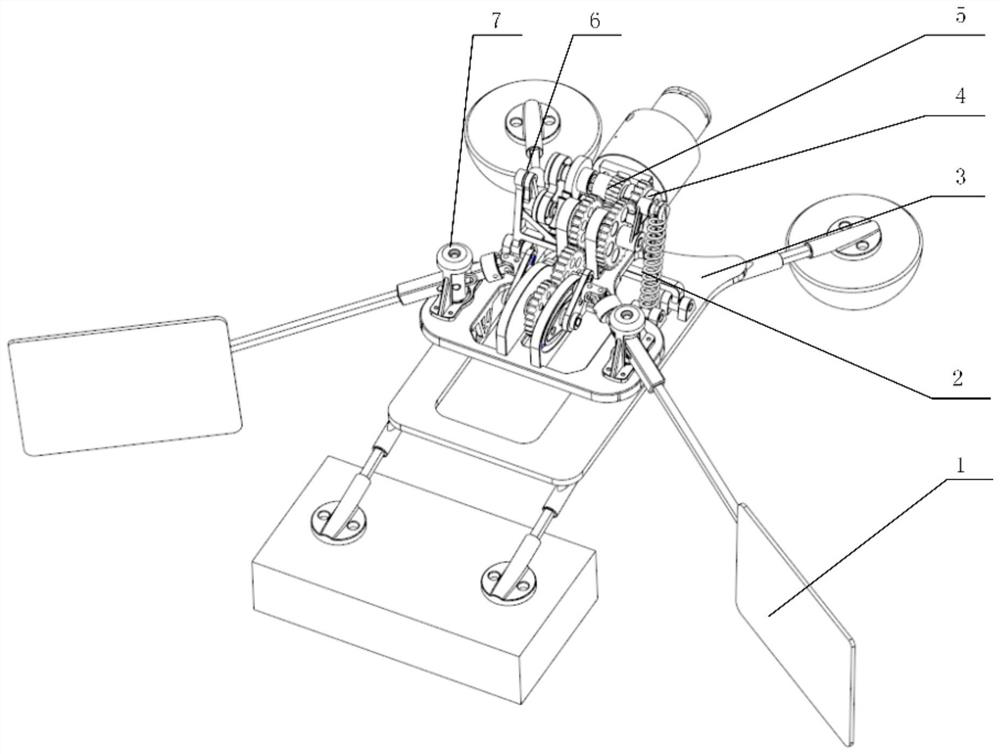
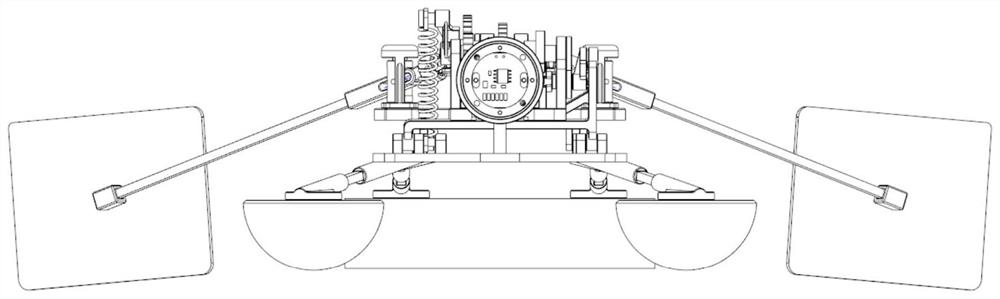
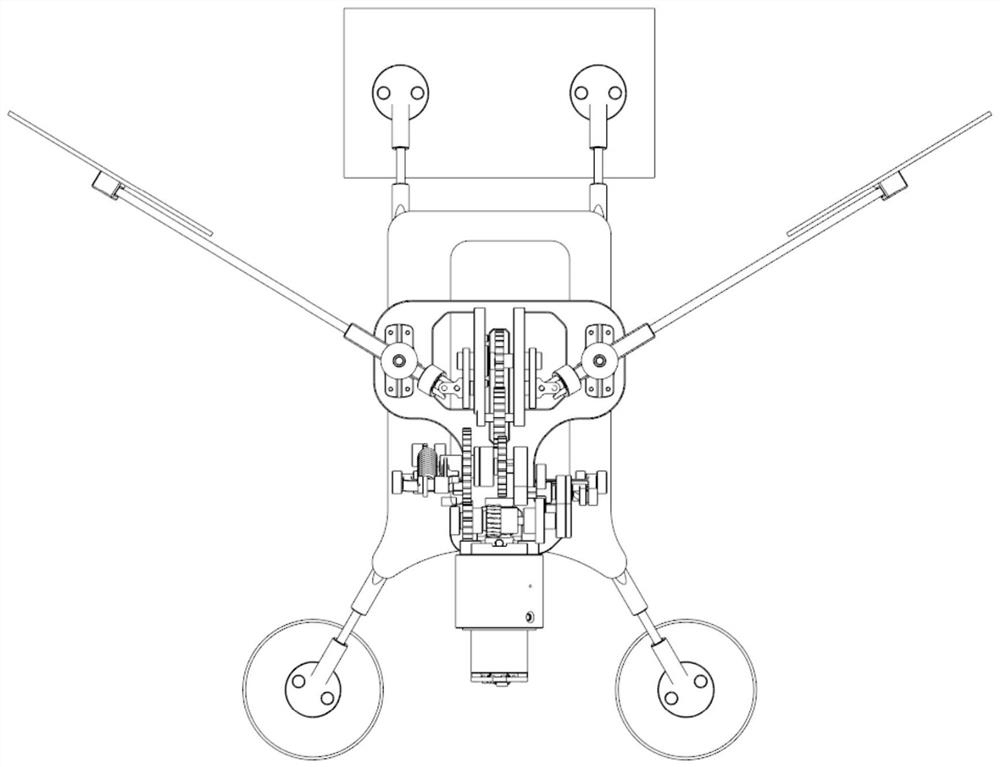
[0038] Such as Figure 1-Figure 10 As shown, a water surface jumping and gliding robot includes a water surface support system 3, a main body support frame 4, a drive system 5, a pitch angle adjustment mechanism 6, an energy storage spring 2, two drive legs 1 and two space elliptical trajectory mechanisms 7; The main body support frame 4 is located above the water surface support system 3, and positioning holes are distributed on the main body support frame 4, and a pair of hinge seats are symmetrically distributed below it. The main body support frame 4 and the water surface support system 3 are connected by a pair of hinge seats. The three space elliptical track mechanisms 7 are symme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More