Inverted long/ultra-short baseline method and device for self-positioning and navigation of underwater target
An underwater target and ultra-short baseline technology, which is applied in satellite radio beacon positioning systems, positioning, and measuring devices, can solve problems that hinder the widespread application of underwater intelligent submersibles and low data update rates, and achieve real-time positioning and navigation services, the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
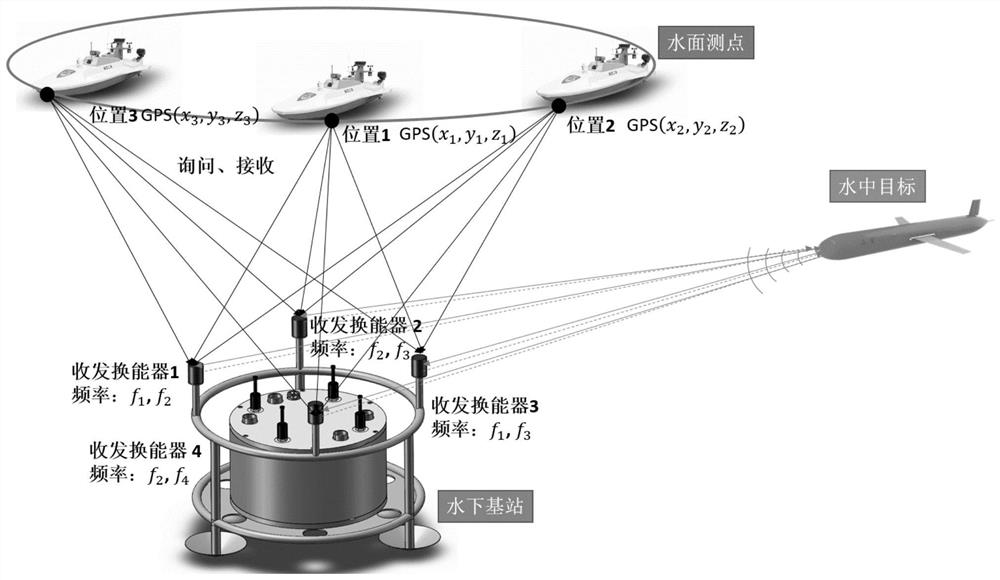
[0045] see Figure 1 to Figure 5 , the embodiment of the present invention provides an inverted long / ultra-short baseline (i-L / USBL) method for self-localization and navigation of an underwater target, the method comprising the following steps:
[0046] Step 1: Use the inverted long baseline principle and surface GPS positioning equipment to accurately locate the underwater base station:
[0047] A single receiving transducer on the water surface inquires each underwater array element transponder at a certain position, and each array element transponder receives the interrogation signal and sends out a coded response signal with its own characteristics, and the surface transducer receives the response signal and outputs it through semi-coherent demodulation. The baseband signals sent by each array element estimate the round-trip time of the sound wave between the transducer and the four array elements, and determine the relative distance between the transducer and a single arr...
Embodiment 2
[0059] The scheme in embodiment 1 is further introduced below in conjunction with specific examples, see the following description for details:
[0060] like Figure 1-Figure 2 Shown is a schematic diagram and a technical implementation diagram of an underwater target self-localization and navigation system based on an inverted long / ultra-short baseline (i-L / USBL) according to an embodiment of the present invention. The theoretical model consists of two parts: an inverted long baseline and an inverted ultra-short baseline. The overall technical structure consists of three parts: surface measuring points, underwater base stations, and underwater targets. The specific calculation steps mainly include:
[0061] 1. Inverted long baseline positioning system
[0062] The traditional long-baseline positioning system usually consists of multiple submarine transponders with a baseline length of several kilometers and a question answering machine on the carrier to be positioned. That ...
Embodiment 3
[0105] An inverted long / ultra-short baseline device for underwater target self-location and navigation, the device includes: a single transducer, a four-element array base station (located on the x and y axes respectively) of underwater autonomous coding responses, and a data processor .
[0106] According to the theoretical analysis of the above-mentioned embodiments 1-2, the embodiment of the present invention builds an underwater inverted ultra-short baseline hardware platform, and conducts an underwater target self-positioning experiment in an anechoic environment through four channels of frequency modulation signals. The hardware platform is mainly composed of a transmitting host computer (computer), a positioning end target transducer (that is, the above-mentioned single transducer), an inverted ultra-short baseline array (that is, the four array elements of the underwater autonomous coding response (located respectively at x and y axes) array base station) and a multi-c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com