Sub-pixel edge detection method
A sub-pixel edge and detection method technology, applied in the field of image processing, to achieve the effect of improving efficiency, improving alignment efficiency, and facilitating fault detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
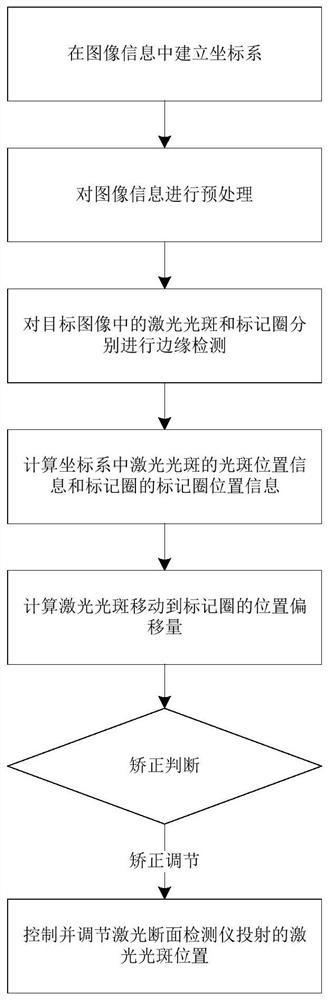
[0064] A sub-pixel edge detection method such as figure 1 shown, including the following steps:
[0065] The step of establishing a coordinate system is to establish a coordinate system in the collected image information, where the image information includes laser spots and marking circles. In this embodiment, the coordinate system is established with the lower right corner of the collected image information as the origin. In other embodiments, other points in the image information may also be used as the coordinate origin.
[0066] Image preprocessing is to perform image preprocessing on the image information to obtain the target image. In this embodiment, the image preprocessing is median filtering, which filters out impulse noise or granular noise, and protects image edges for subsequent edge detection.
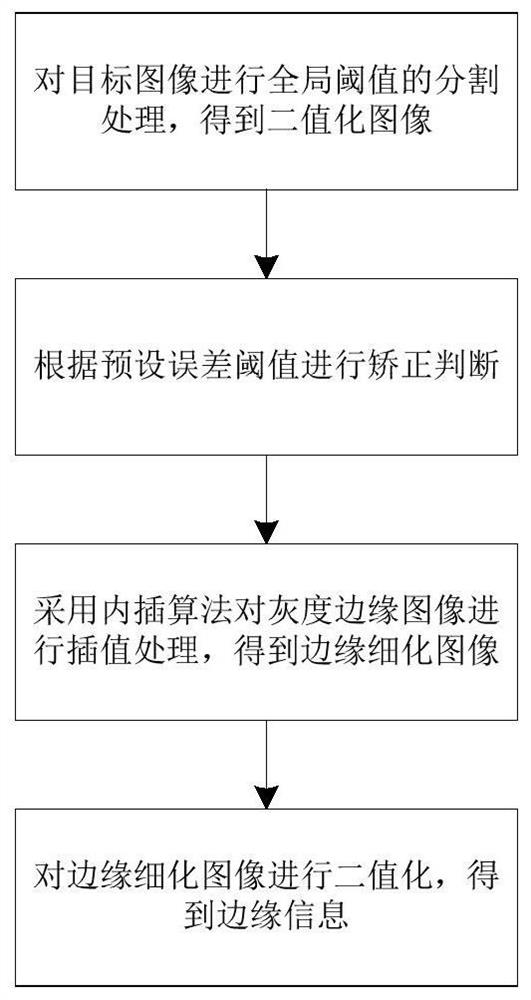
[0067] In the edge detection step, edge detection is performed on the laser spot and the marking circle in the target image respectively, to obtain the edge information o...
Embodiment 2
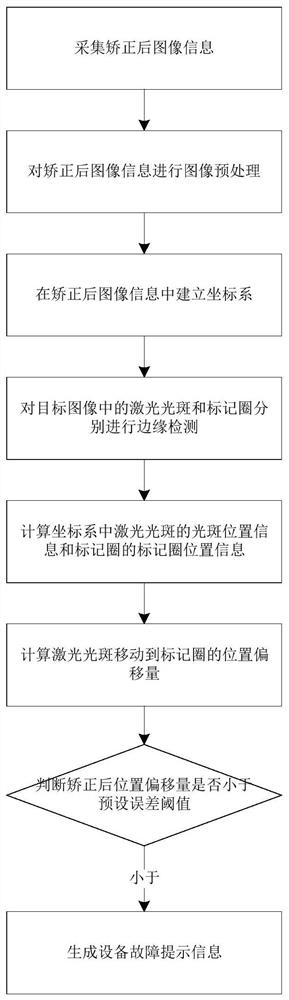
[0086] The difference from Embodiment 1 is that after the correction step, a correction effect tracking step is included to calculate the corrected position offset between the laser spot and the marking circle in the corrected image, and if the corrected position offset is less than the preset error If the threshold is not less than, a device failure prompt message is generated; if it is less than, an alignment completion prompt message is generated. Such as image 3 As shown, it specifically includes the following steps:
[0087] Step S1, collecting corrected image information;
[0088] Step S2, establishing a coordinate system in the corrected image;
[0089] Step S3, performing image preprocessing on the corrected image information to obtain the corrected target image;
[0090] Step S4, performing edge detection on the laser spot and the marked circle in the corrected target image respectively, to obtain the edge information of the corrected light spot and the edge infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com