End effector of oral implant robot and compliance control method
An end-effector and robot technology, which is used in dental implants, medical science, dentistry, etc., can solve the problems of uneven force on the drill needle, axis offset, joint rotation position error, cavity accuracy, etc., so as to improve the cavity accuracy. , the effect of avoiding errors and reducing stiffness requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
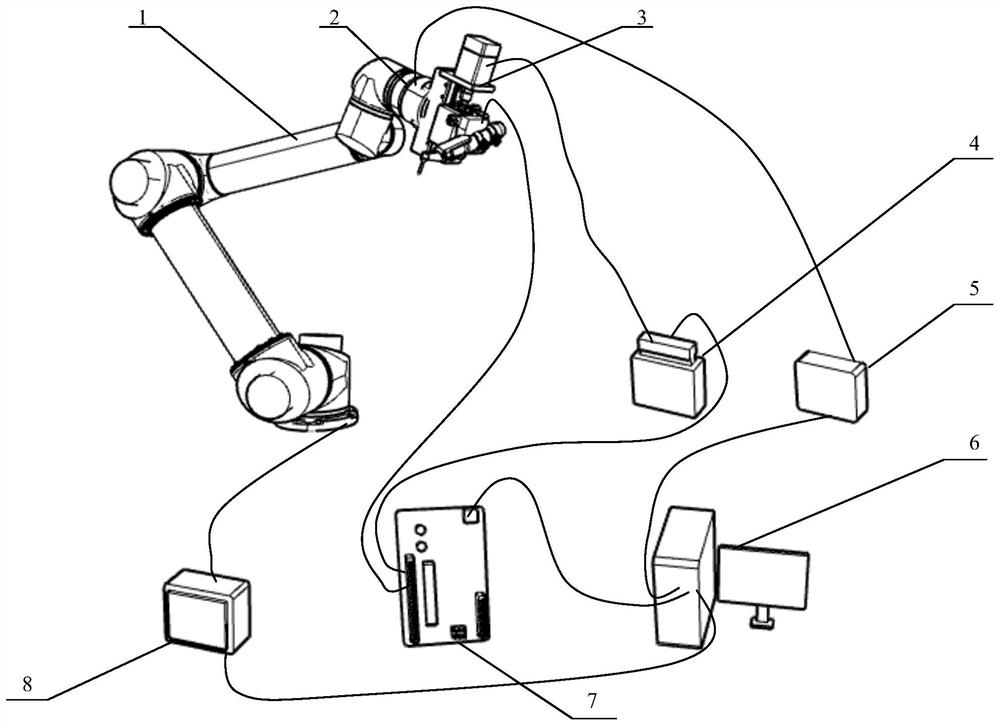
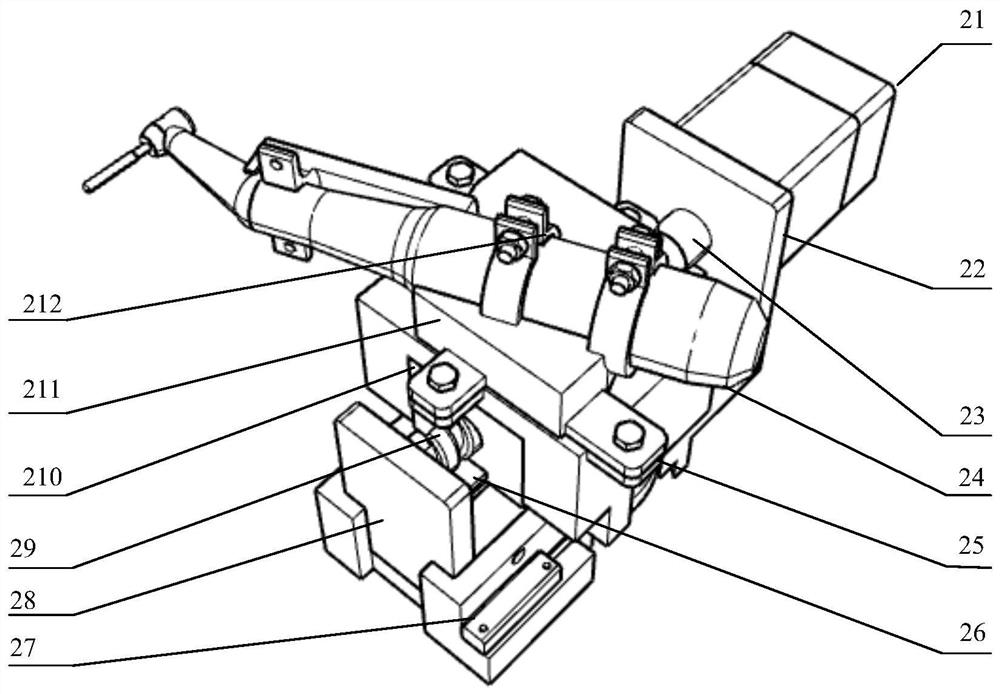
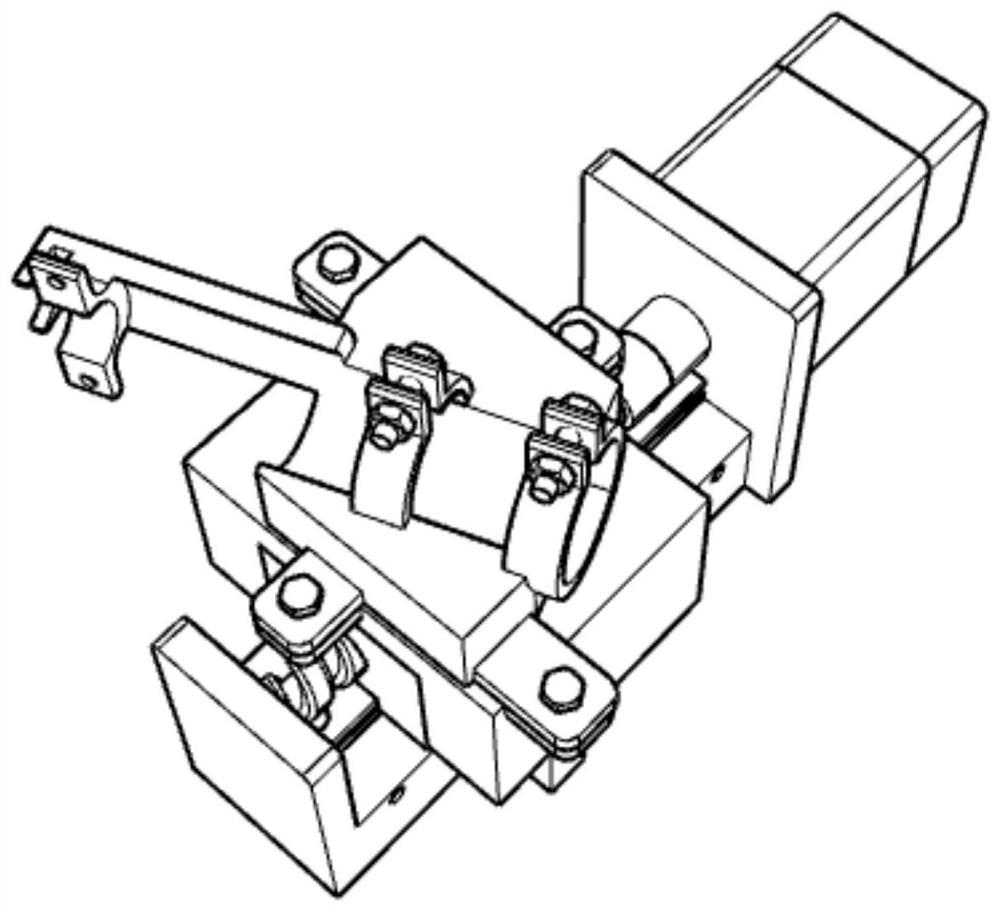
[0040] refer to Figure 1 ~ Figure 4 , an end effector of an oral implant robot, comprising a six-dimensional force sensor 2, a linear feed mechanism, a closed-loop stepper motor driver 4 and a linear displacement sensor 28, the linear feed mechanism comprising a closed-loop stepper motor 21, a ball screw 29 , the slider 210 and the planting mobile phone 24, the closed-loop stepper motor 21 is connected with the ball screw 210 through a coupling, the slider 210 is installed on the ball screw 29, the clamping mechanism 211 is connected with the slider 210 through bolts, and the clamping The mechanism 211 clamps the planting mobile phone 24, and a rubber pad 212 is installed between the two to increase friction and shock absorption; during the feeding process, the output shaft of the closed-loop stepping motor 22 rotates, which is converted into linear displacement by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com