

Real-time collision early warning system and method for mechanical arm in tunnel environment
A tunnel environment and collision warning technology, applied in the direction of electric transmission signal system, alarm, instrument, etc., can solve the problems of reducing detection accuracy, complex implementation methods, and increasing algorithm complexity, so as to improve construction efficiency and construction safety, Taking into account fluency and safety, reducing the effect of construction accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
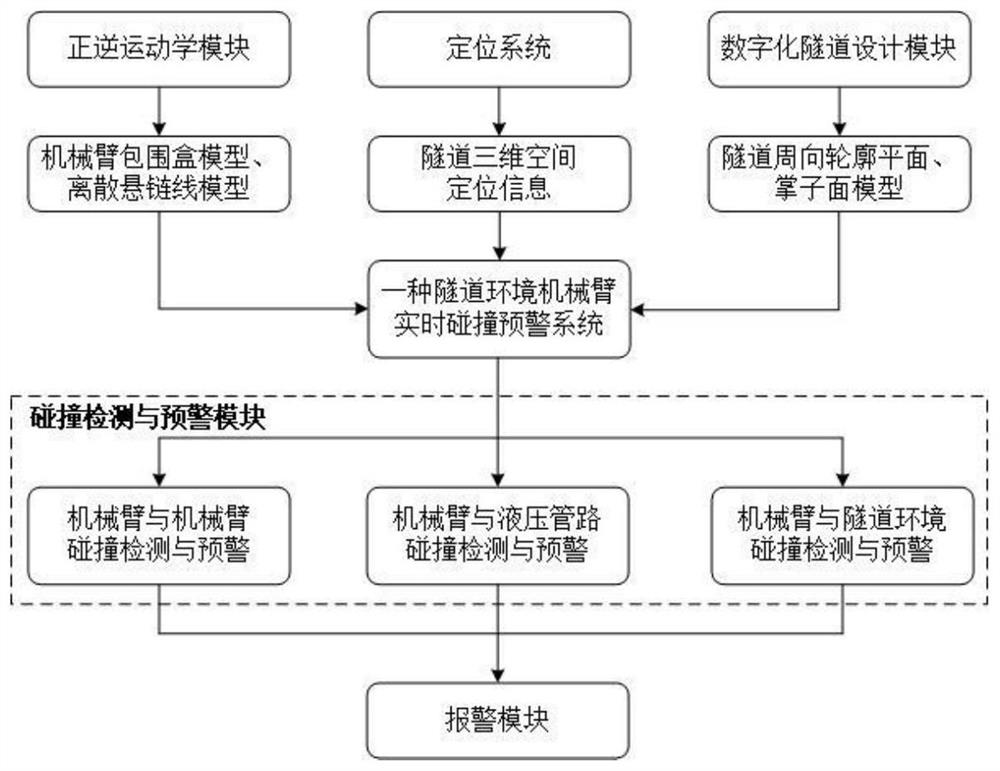
[0045] see figure 1 , a real-time collision warning system for manipulators in a tunnel environment, including an inverse kinematics module, a forward kinematics module, a positioning system, a digital tunnel design module, a collision detection and early warning module, and an alarm module; the inverse kinematics module is used to obtain the current The joint variables when the mechanical arm reaches the desired pose, the forward kinematics module is used to obtain the real-time pose of each joint of the robotic arm relative to the reference coordinate system, the positioning system is used to obtain the three-dimensional space positioning information of the tunnel, and the digital The tunnel design module is used to provide information on the contour surface of the tunnel, and the collision detection and early warning module is used to perform collision detection and multi-level early warning on the robot arm and the robot arm, the robot arm and the hydraulic pipeline, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More