

Recovery system and recovery method for automatically recovering autonomous underwater robot on water surface
A technology of underwater robots and recovery systems, applied in the direction of lifting devices, etc., can solve the problems of restricting AUV operation efficiency and development and application, low efficiency, poor autonomy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
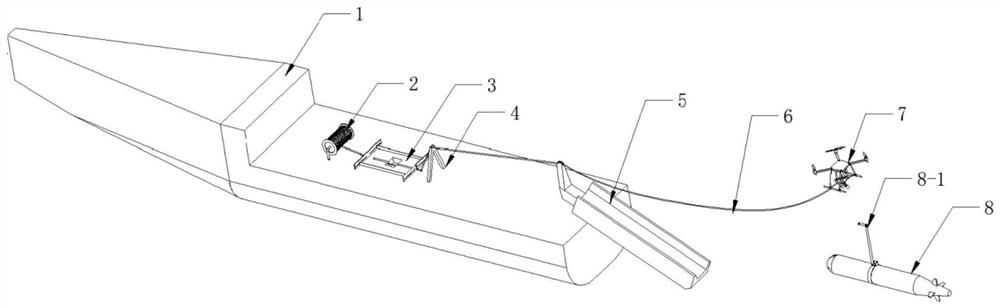
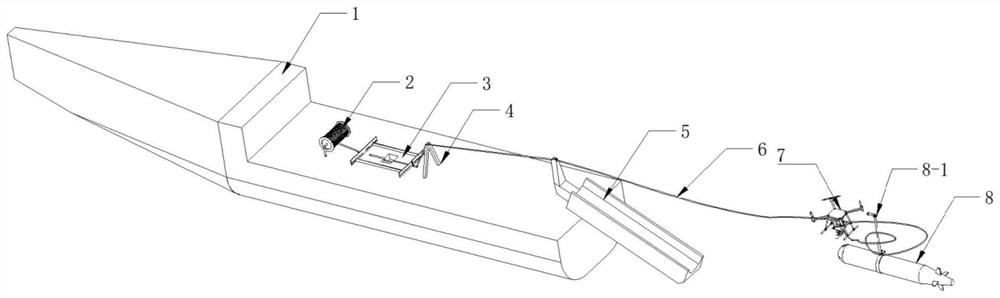
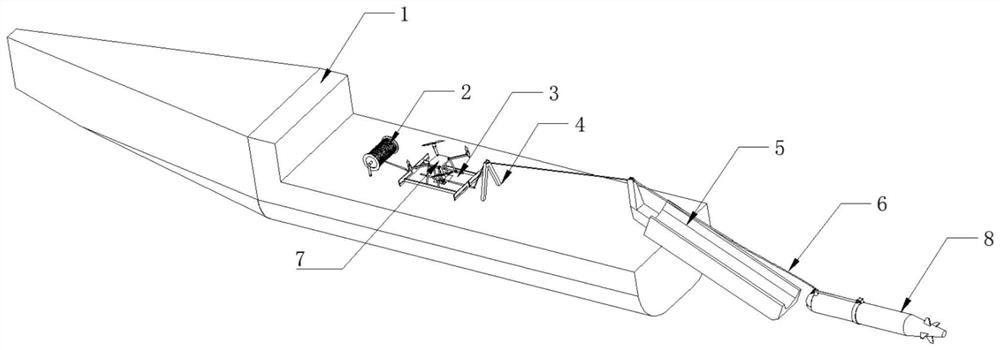
[0048] See figure 1 , figure 1 It is a schematic diagram of the first embodiment of the recovery system for autonomously recovering AUVs on the water surface of the present invention. The recovery system for autonomously recovering AUVs on the water surface includes:
[0049] UAV7, a winch 2 arranged on a boat 1, and a docking part 8-1 arranged on an AUV8; wherein:
[0050] winch 2 for retrieving and releasing the cable 6;
[0051] UAV7 is used to drive the cable 6 to form an automatically detachable connection with the docking part 8-1;
[0052] The docking part 8-1 is used to form an automatic detachable connection with the cable 6 driven by the UAV7.
[0053]The UAV7 in this embodiment is a fast-growing aircraft, which has the advantages of low cost, diverse functions, and convenient use, and is widely used in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More