

A method for adaptive positioning of indoor AGV based on laser slam
A positioning method and self-adaptive technology, applied in the re-radiation of electromagnetic waves, navigation, instruments, etc., can solve the problems of inability to provide consistent and stable positioning information, poor positioning flexibility, and increased costs, achieving low cost, improved efficiency, The effect of reducing the difficulty of development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
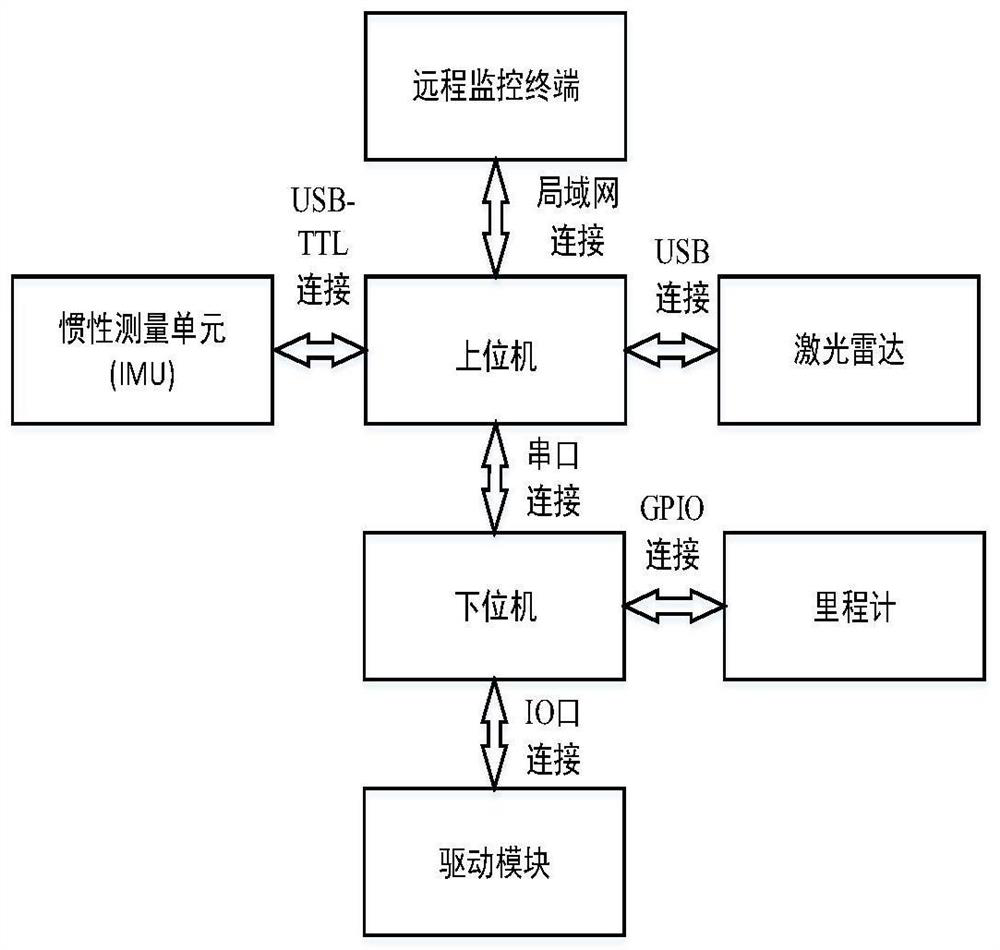
[0060] figure 1 It is a hardware structure diagram of the AGV adaptive positioning method based on laser SLAM in the present invention, composed of figure 1 shown.
[0061] In the present invention, what upper computer selects is NVIDIA TX2 high-performance embedded development board, is equipped with Ubuntu16.04 and ROS Kinetic operating system. The lower computer is an STM32 embedded development board, and the remote monitoring terminal is a laptop, which is also equipped with Ubuntu and ROS operating systems, which are used to display the running status of the AGV and issue coordinate commands of the target point.
[0062] The RPLidar A2 laser radar used is connected to the host computer through a USB cable. The laser radar collects the distance and angle information of obstacles within the eff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More