

Rotor wing type plant protection unmanned aerial vehicle attitude tracking control method based on anti-saturation finite time
A plant protection UAV, limited time technology, applied in the field of attitude tracking control of rotary-wing plant protection UAV, to achieve the effect of improving saturation suppression capability, suppressing jitter phenomenon, improving robustness and trajectory tracking quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0102] In order to have a further understanding and understanding of the structural features of the present invention and the achieved effects, the preferred embodiments and accompanying drawings are used for a detailed description, as follows:
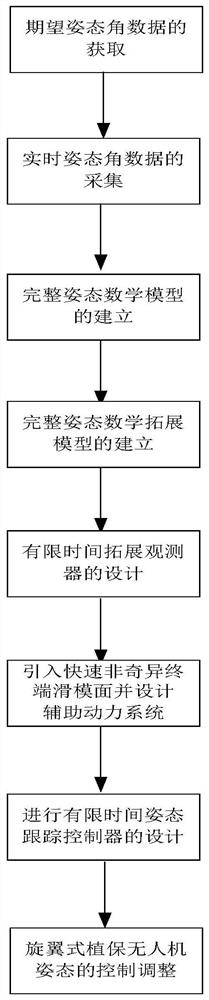
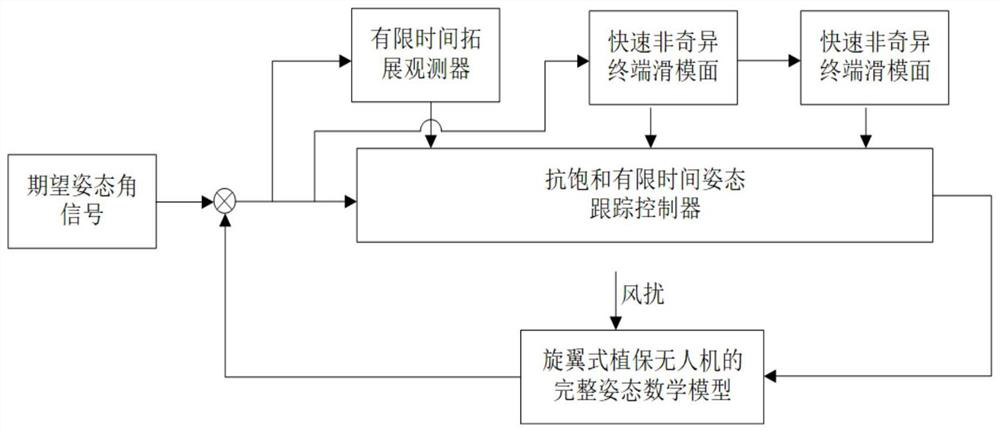
[0103] Such as figure 1 and figure 2 As shown, a kind of anti-saturation finite time based rotor type plant protection drone attitude tracking control method according to the present invention comprises the following steps:
[0104] The first step is to obtain the desired attitude angle data: obtain the expected attitude angle data input into the flight data memory of the rotor-type plant protection UAV, and the expected attitude angle data is set according to the flight attitude requirements of the rotor-type plant protection UAV.
[0105] The second step is the collection of real-time attitude angle data: collect real-time data of attitude angle through the attitude sensor carried by the rotor-type plant protection UAV, and save t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More