

Inchworm type magnetic control soft robot for small pipeline detection and use method
A technology of robots and pipelines, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of impossibility, affecting work efficiency, high manufacturing cost, etc., and achieve the effects of accurate precision, changeable movement, and large bending deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing, the present invention will be further explained;
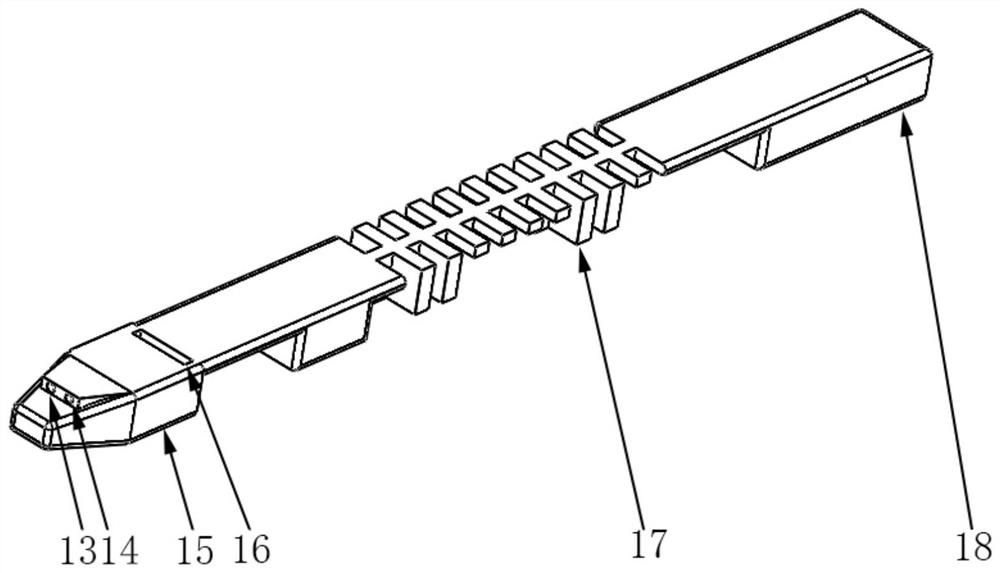
[0033] Such as figure 1 As shown, an inchworm-type magnetically controlled soft robot for small pipeline detection is printed as a whole by multi-material 3D printing technology. Actuator 15, middle actuator 17 and rear end actuator 18.
[0034] The back-end actuator 18 and the front-end actuator 15 have a block structure, and are printed by using Spot A photocurable resin and magnetic nanoparticle EMG 1200. The front end actuator 15 is provided with a miniature camera 13 and an illumination light source 14, and the cable drawn out through the pipeline hole 16 feeds back the actual working conditions inside the small pipeline to the PC terminal.
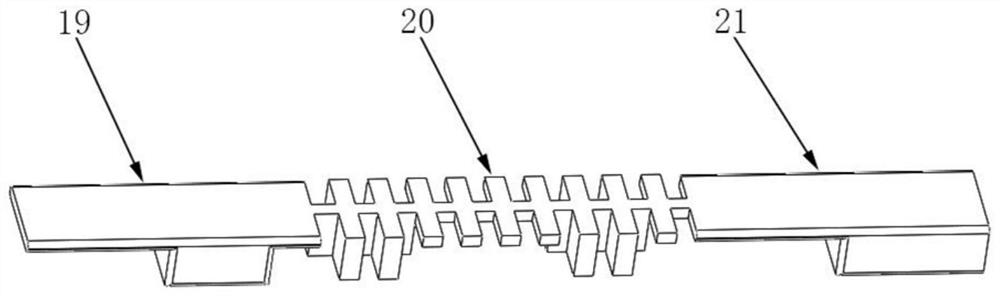
[0035] Such as figure 2 As shown, the middle actuator 17 is printed with Spot A photocurable resin, and includes a back end connection support table 21, a front end connection support table 19 and an intermediate deformation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More