

Dead-beat direct torque control and implementation method based on sliding mode strategy
A technology of direct torque control and implementation method, which is applied in the direction of single motor speed/torque control, control system, motor control, etc. It can solve the problems of reducing the control performance of the motor speed control system and weakening chattering, so as to improve the anti-interference ability, suppress chattering, and improve the effect of convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
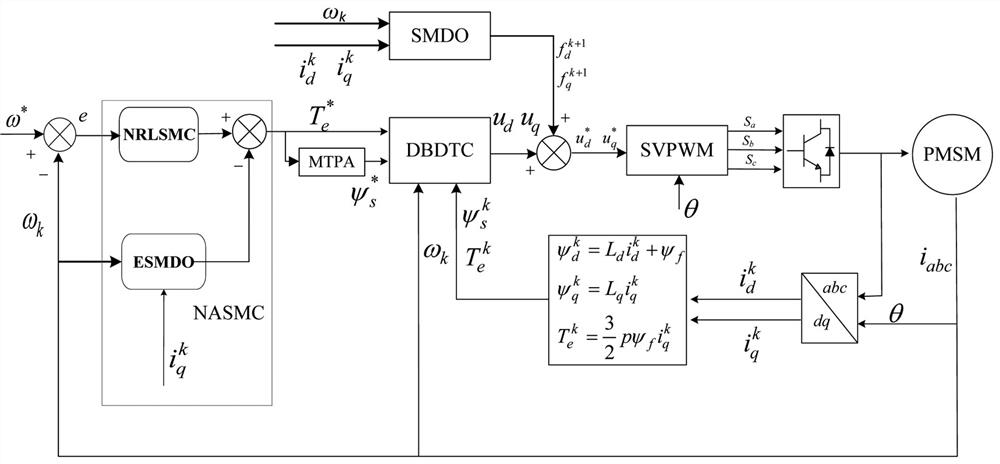
[0052] Such as figure 1 As shown, a dead-beat direct torque control and implementation method based on sliding mode strategy includes the following steps:
[0053] Step 1, with a given rotor angular velocity ω * and measure the rotor angular velocity ω k The deviation of the speed is used as the input quantity, and the speed deviation ω * -ω k Input to anti-disturbance sliding mode controller, output torque given value
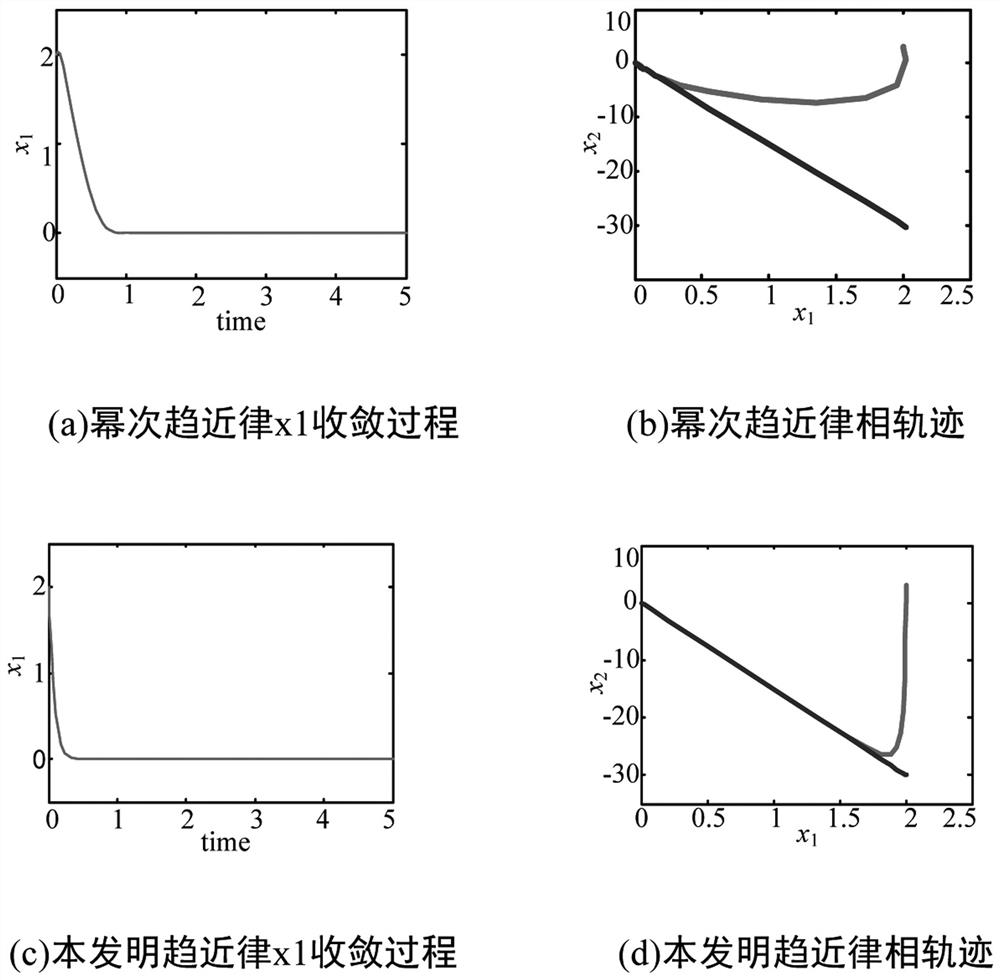
[0054] Among them, the reaching law in the anti-disturbance sliding mode controller is:
[0055]
[0056]
[0057] The calculation formula of the sliding mode surface information function s is:
[0058]
[0059] In the formula, x is the system state variable, δ is the exponent of the power term, λ and α are the minimum and maximum values that δ can reach respectively, β is the coefficient of the constant term for adjusting the rate of change of δ, and ε is the coefficient of the power term of variable exponent; γ is the state variable index;...
Embodiment 2
[0088] This embodiment provides a deadbeat direct torque control system based on a sliding mode strategy, including:
[0089] Speed sensor for measuring the angular velocity ω of the motor rotor k ;
[0090] Anti-disturbance sliding mode controller (NASMC) for a given rotor angular velocity ω * and the rotor angular velocity ω measured by the rotational speed sensor k Deviation output torque given value
[0091] The power sensing device is used for sensing the phase current of the stator three-phase winding of the motor;
[0092] The coordinate transformation module is used to convert the phase currents of the three-phase windings of the stator of the motor to obtain the two-phase current i in the two-phase static αβ coordinate system through Clark transformation α and i β After that, set i α and i β The two-phase current in the two-phase rotating dq coordinate system is obtained by Park transformation and use and calculated After that, output the result t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More