

Obstacle visual detection method based on FIRA platform
A visual detection and obstacle technology, applied in image data processing, special data processing applications, instruments, etc., can solve the problems of low detection accuracy and slow speed, and achieve high detection accuracy, reduce dependence, and fully utilize the effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
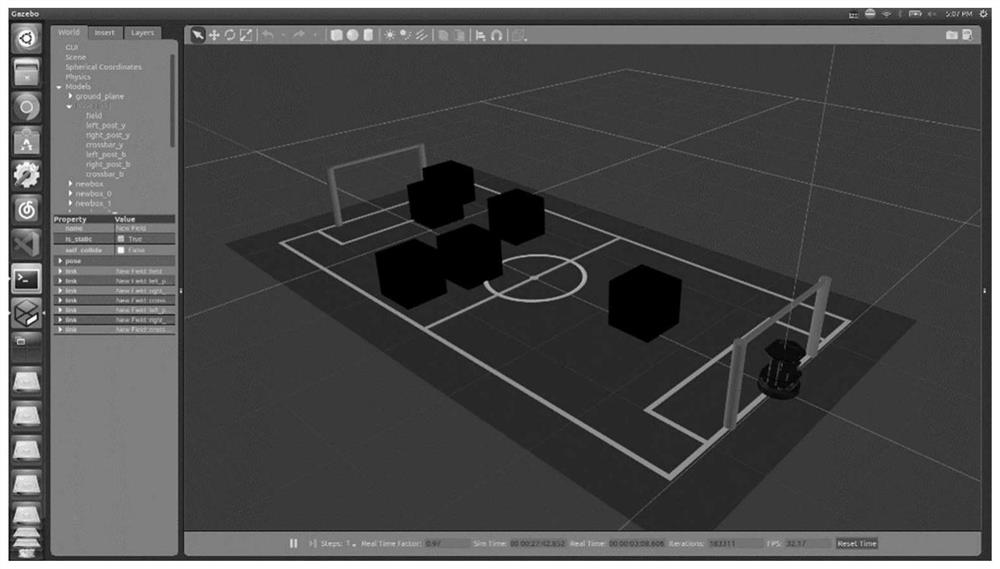
[0057] The obstacle detection of the dimensionality reduction method of the present invention mainly includes image preprocessing, longitudinal obstacle extraction, obstacle segmentation, exception processing, and result output five parts, each part is specifically as follows:
[0058] 1. Image preprocessing:
[0059] Such as image 3 As shown, first, the color dimensionality reduction from RGB to grayscale is performed on the input image (640*480). Carry out two erosion and dilation operations in sequence, and the kernel size of both erosion and dilation is 2 pixels in size.
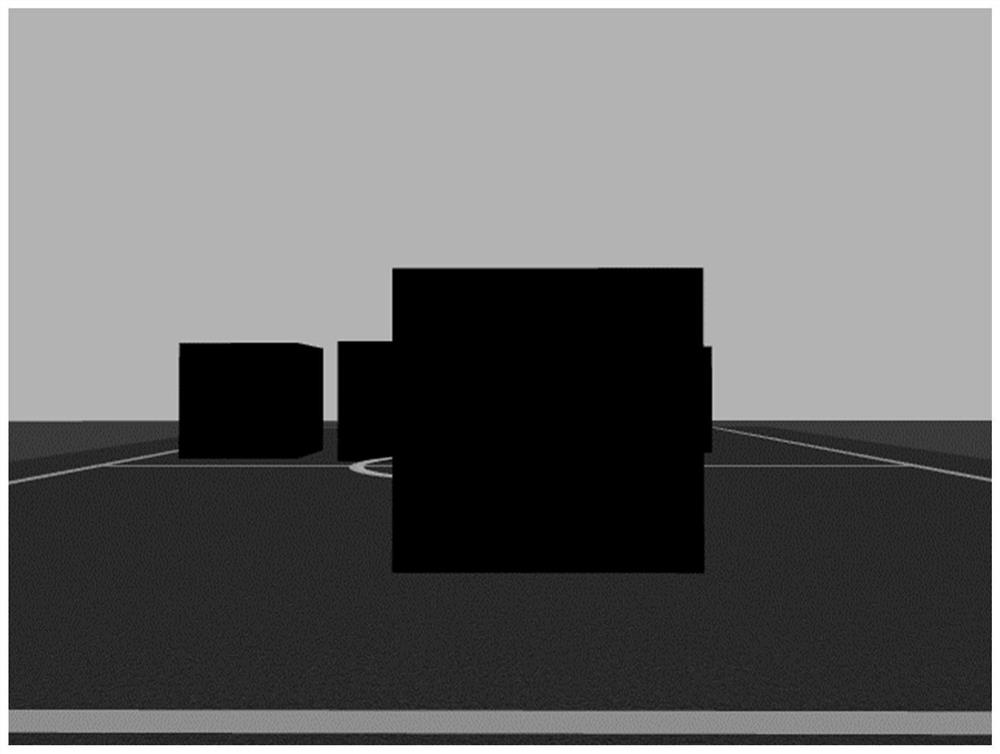
[0060] 2. Longitudinal obstacle extraction:
[0061] Take the brightness of 20 as the threshold, extract the number of pixels whose brightness is less than the threshold in each column, and obtain a one-dimensional array with a length of 640. According to the formula 1, the xy coordinates are obtained. If there is no obstacle pixel in a column, dividing by zero in the formula will cause a program err...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More