

GPS receiver autonomous integrity monitoring method
A GPS receiver and integrity monitoring technology, applied in the field of satellite navigation receivers, can solve the problems of easily falling into local optimum, affecting the accuracy of PF estimation, particle depletion, etc., so as to improve the problem of particle depletion and improve particle diversity. The effect of stability and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] Embodiments of the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, so they are only examples, and should not be used to limit the protection scope of the present invention.
[0095] It should be noted that, unless otherwise specified, the technical terms or scientific terms used in this application shall have the usual meanings understood by those skilled in the art to which the present invention belongs.
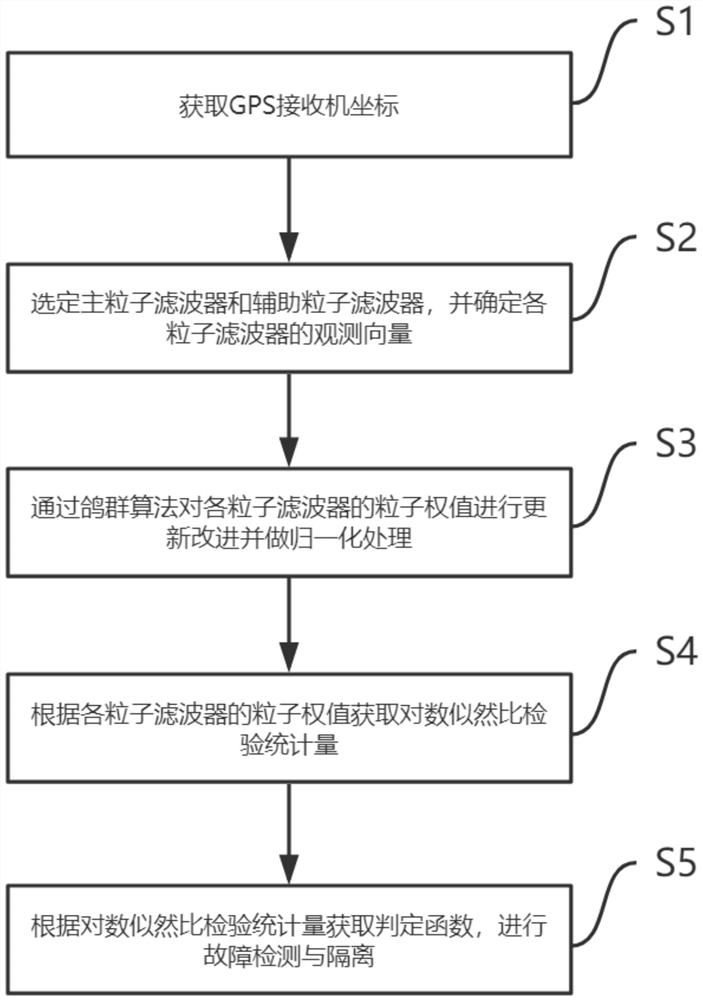
[0096] figure 1 For a flow chart of the steps of a GPS receiver autonomous integrity monitoring method provided in an embodiment of the present invention, see figure 1 , the method includes the following steps:
[0097] S1: Calculate the coordinates of the GPS receiver by receiving signals from several satellites.
[0098] Select n=6 GPS satellites, numbered 3, 8, 12, 24, 26, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More