

Positioning cruise system for underwater helicopter and working method of positioning cruise system
A cruise system and helicopter technology, which is applied in the field of positioning and cruise system of underwater helicopters, can solve problems such as the inability to meet the needs of UUV underwater autonomous positioning and navigation, and the failure to meet expectations, so as to improve high-precision positioning and navigation capabilities, reduce energy consumption, Increase the effect of underwater work time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be noted that the following embodiments are intended to facilitate the understanding of the present invention, but do not limit it in any way.
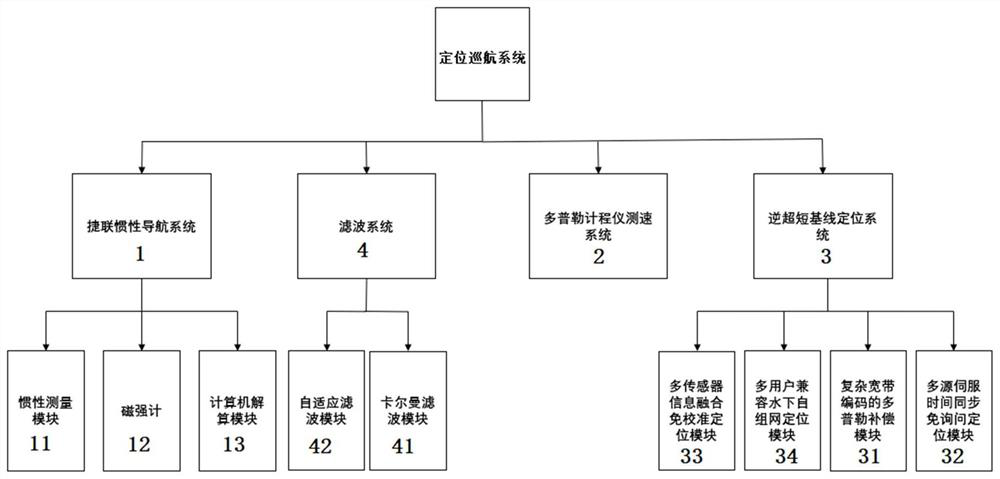
[0047] Such as figure 1 As shown, a positioning and cruising system for an underwater helicopter includes a strapdown inertial navigation system 1 , a Doppler odometer speed measurement system 2 , an inverse ultra-short baseline positioning system 3 and a filtering system 4 .
[0048] The strapdown inertial navigation system 1 is composed of three modules: an inertial measurement module 11 , a magnetometer 12 and a computer calculation module 13 . Inertial measurement module 11 measures motion parameters such as angular velocity and acceleration of underwater helicopter relative to seabed space through gyroscope and accelerometer; magnetometer 12 is used to measure the size and direction of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More