Minimally invasive surgery robot arm
A minimally invasive surgery and robotic hand technology, applied in the field of robotic hands, can solve problems such as time-consuming, inconvenient use, and inflexibility of equipment, so as to reduce hospitalization time and other costs, facilitate surgical operations, and reduce surgical risks Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
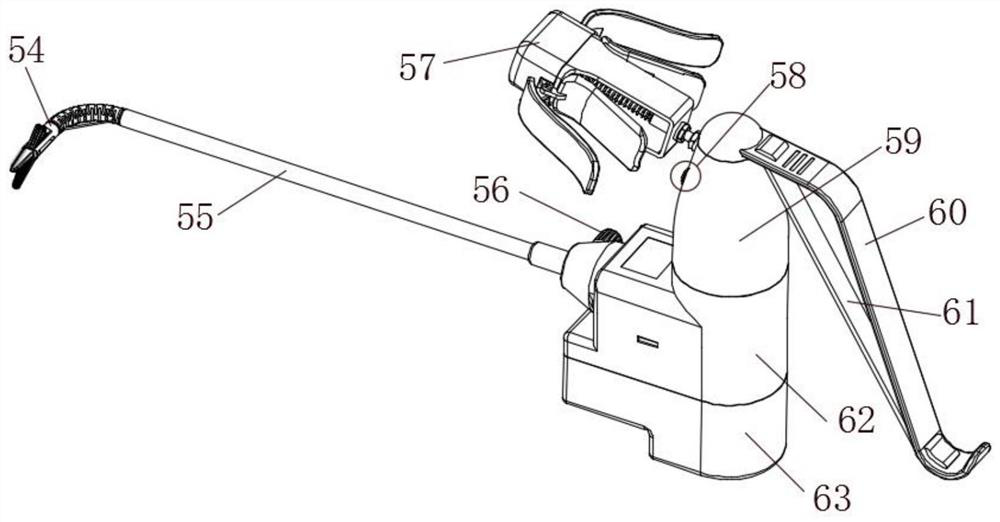
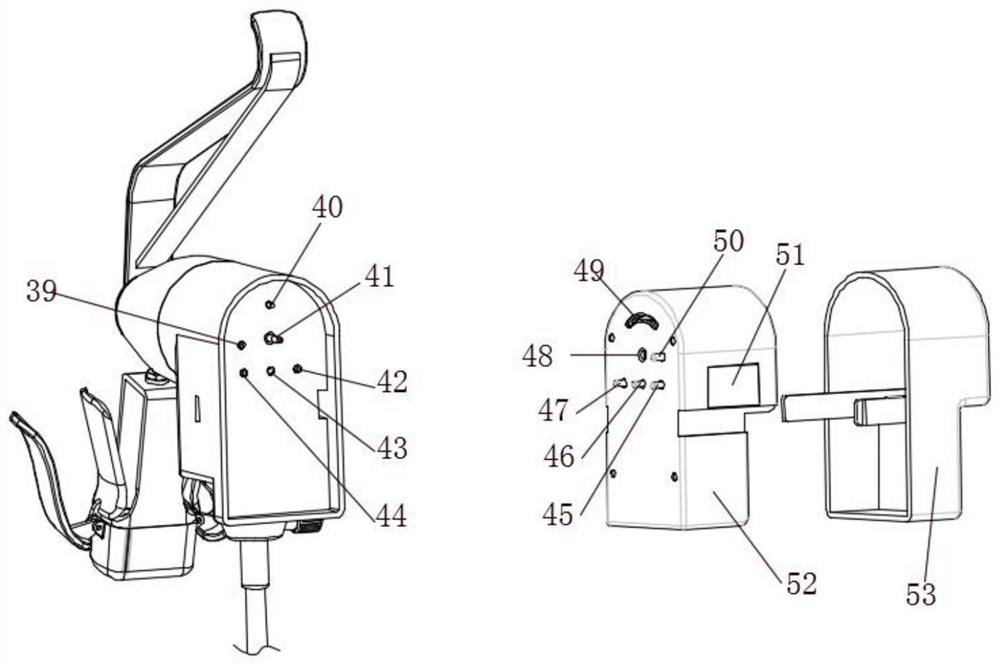
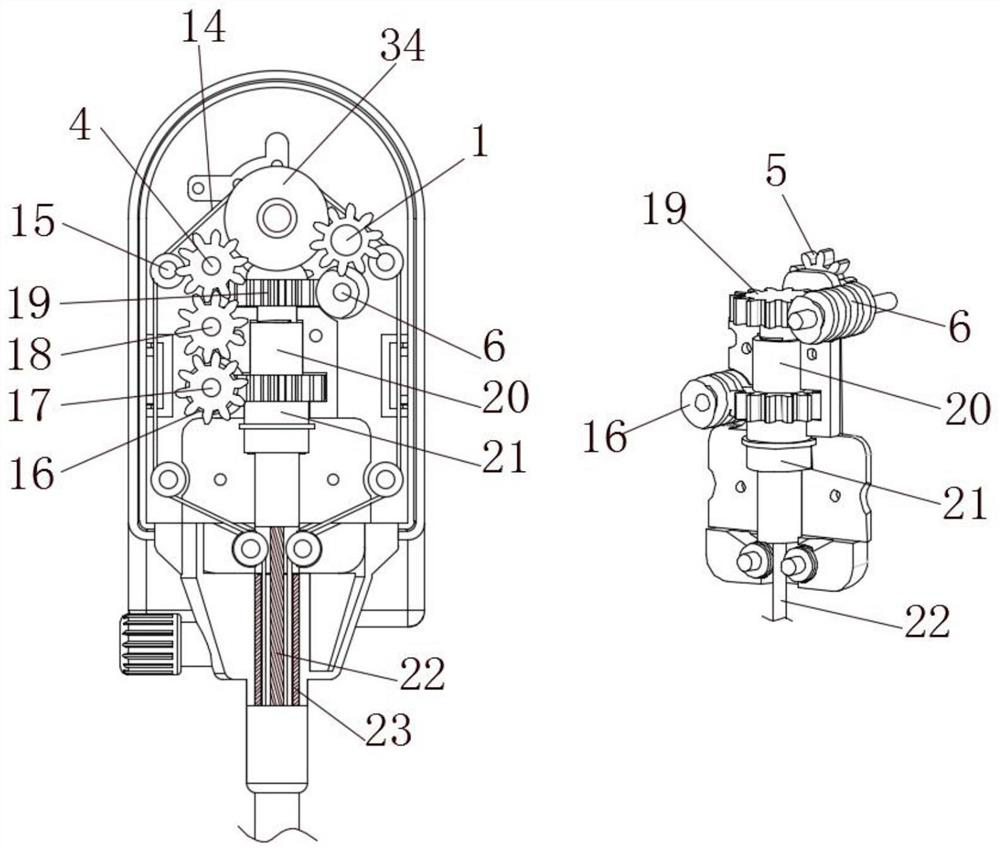
[0028] see Figure 1-9, in the embodiment of the present invention, the minimally invasive surgical robot hand includes an auxiliary rod 55, a hand controller 59, a mechanical transmission group 62, a main control unit housing 52, a battery housing 53, a wire clamping plate 34, a gear B17, and a return spring 24 , the flexible drive shaft A3 and the fixed plate 10, the main control unit shell 52 and the battery shell 53 have the main control unit and the battery inside, the main control unit shell 52 and the battery shell 53 are fixed at the mechanical transmission group 62, the main control unit battery assembly It is independently separated and assembled when used. One end of the auxiliary rod 55 is sleeved with the manipulator 54, and the other end of the auxiliary rod 55 is fixedly connected to the mechanical transmission group 62. The bottom end of the mechanical transmission group 62 is fixedly connected to the main control unit battery assembly. 63. Release the thumb an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com