

Buffer device with leg type structure
A cushioning device and leg-type technology, applied in the field of robotics, can solve the problem that the aircraft cannot be attached stably, and achieve the effect of simple structure, simple method and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
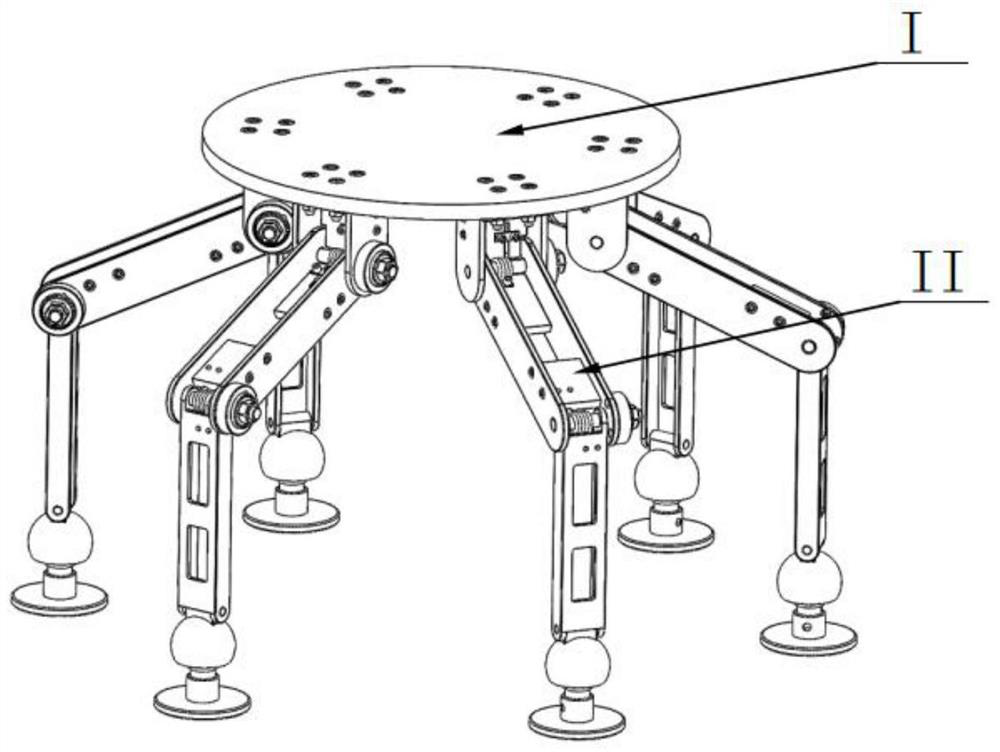
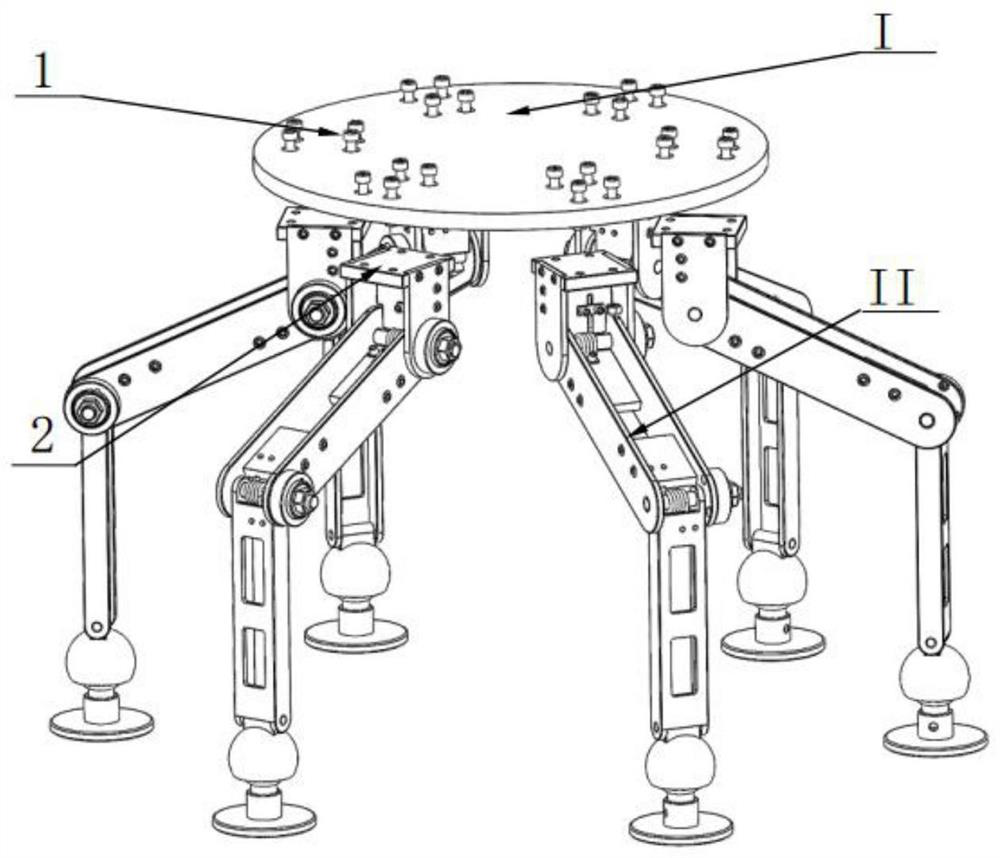
[0038] In this example, see figure 1, a buffer device with a leg-type structure, including a device placement plate I and a plurality of buffer energy-absorbing legs II, the buffer energy-absorbing legs II have a connecting plate 2 connected to the device placement plate I through a bolt 1; each The buffer energy-absorbing leg II has multiple joints, and each joint has a torsion spring 7; when the buffer device collides with the target surface, the angle of each joint of the buffer energy-absorbing leg II changes, so that the torsion spring 7 located at the joint When deformation occurs, the kinetic energy is converted into elastic potential energy, and the joint can only rotate in one direction, so as to avoid the conversion of elastic potential energy into kinetic energy and cause rebound movement, resulting in buffer failure; the buffer device adopts a multi-leg configuration, which can adapt to the complex surface characteristics of the target , improve stability and buffe...
Embodiment 2
[0041] This embodiment is basically the same as Embodiment 1, especially in that:
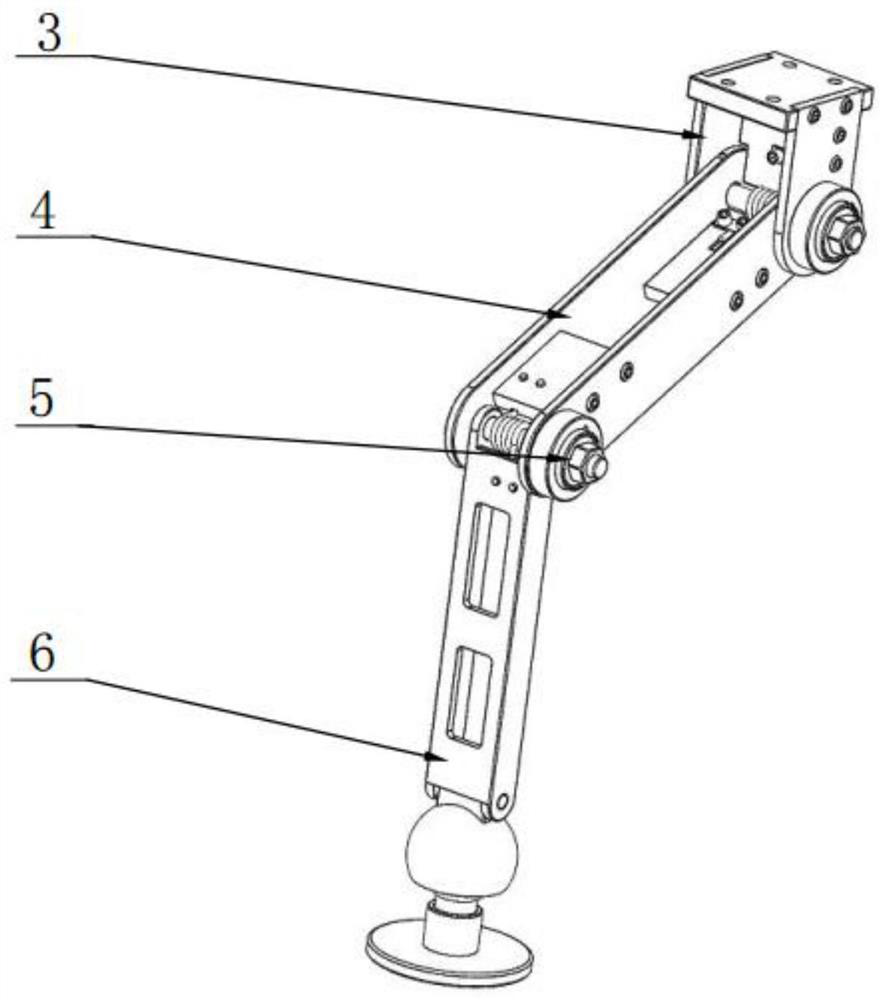
[0042] In this embodiment, the buffer energy-absorbing leg II includes an upper support leg 3, a middle support leg 4, a lower support leg 6 and a one-way energy-absorbing structure 5. There are two groups of one-way buffer structures 5, and the upper support leg 3 One group between the middle support legs 4, one group between the middle support legs 4 and the lower support legs 6.
[0043] In this embodiment, the upper support leg 3 is connected with the device placement plate 1 through the connecting plate 2, the connecting plate 2 is in a concave shape, and is fixedly connected with the two side plates 16 by bolts 8, and the upper supporting leg 3 Place plate 1 vertically to device, the connecting hole of energy-absorbing mechanism is set on both side plates 16; Be fixed with torsion spring fixed plate 15 with side plate 16 perpendicular positions, one side of torsion spring 7 is fixed on to...
Embodiment 3
[0050] This embodiment is basically the same as the above-mentioned embodiment, and the special features are:
[0051] In this embodiment, the ball pair 21 has three degrees of freedom, and its movement space is a cone with a cone angle of 15°, constituting a buffer structure.
[0052] In this embodiment, the stiffness coefficient of the torsion spring 7 located at the joint of the middle support leg 4 and the lower support leg 6 is smaller than the stiffness coefficient of the torsion spring 7 at the joint of the upper support leg 3 and the middle support leg 4, realizing two joints Simultaneously act to form a device for absorbing and storing energy.
[0053] In this embodiment, before the initial contact, the angle formed by the center line of the upper support leg 3 and the center line of the middle support leg 4, the angle formed by the center line of the middle support leg 4 and the center line of the lower support leg 6, Both are 120°, and the state of each buffer leg ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More