Notch type continuum robot based on crossed bent beam structure
A continuum and robot technology, applied in the direction of surgical robots, etc., can solve the problems of excessive driving force, complex structure size, excessive material strain, etc., and achieve the effect of small bending friction, large internal and external diameter ratio, and small number of parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
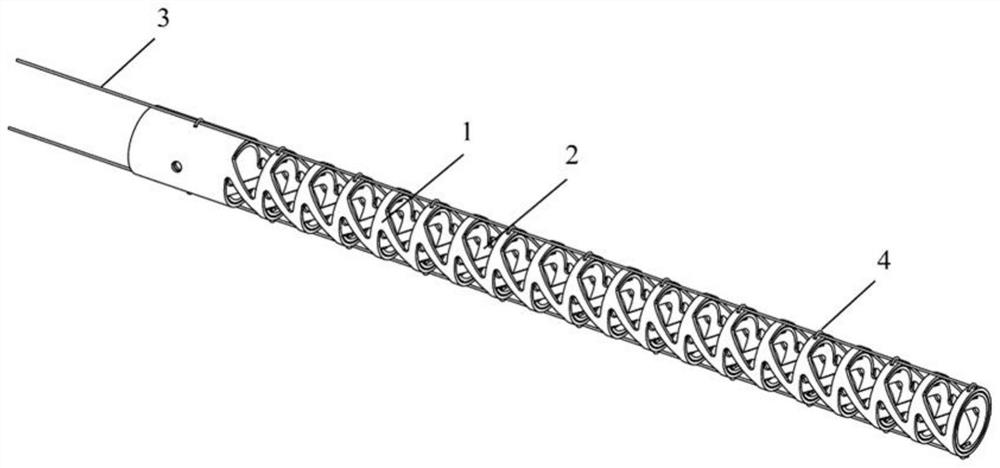
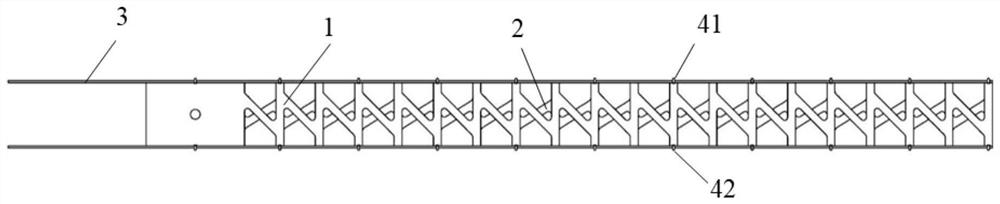
[0052] like Figure 1 to Figure 7 As shown, a notched continuum robot based on the cross-bending beam structure includes an outer tube notched skeleton 1, an inner tube notched skeleton 2 and a driving rope 3, and an inner tube notched skeleton 2 is sleeved inside the outer tube notched skeleton 1, and an outer notched skeleton 2 is provided. The side wall of the pipe incision skeleton 1 is provided with a driving rope channel 4, and one end of the driving rope 3 passes through the driving rope channel 4 and is fixedly connected with the top of the incision-type continuum robot. The outer tube notch frame 1 and the inner tube notch frame 2 are respectively processed from a nickel-titanium tube.
[0053] Outer tube otch skeleton 1 comprises nineteen exoskeleton bending joints 11 and an exoskeleton base 15, and interior tube incision skeleton 2 comprises nineteen inner skeleton bending joints 21 and an inner skeleton base 25; Outer skeleton bending joints 11 and The heights of ...
Embodiment 2
[0060] like Figure 8 to Figure 10 As shown, the main difference from Embodiment 1 is that the upper end surface and the lower end surface of the outer skeleton circular tube wall 13 and the inner skeleton circular tube wall are not perpendicular to the central axis of the continuum robot as a whole. The specific structure is as follows:
[0061] A notch-type continuum robot based on a cross-bending beam structure, comprising an outer tube notch frame 1, an inner tube notch frame 2 and a driving rope 3, an inner tube notch frame 2 is set inside the outer tube notch frame 1, and an outer tube notch frame The side wall of 1 is provided with a driving rope channel 4, and one end of the driving rope 3 passes through the driving rope channel 4 and is fixedly connected with the top of the incision-type continuum robot. The outer tube notch frame 1 and the inner tube notch frame 2 are respectively processed from a nickel-titanium tube.
[0062] Outer tube otch skeleton 1 comprises ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com