Excavator movable arm energy recovery system based on pressure variable energy accumulator
A technology of energy recovery and accumulators, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problem of inability to directly release the boom cylinder, energy cannot be recovered, and energy recovery Problems such as low utilization rate, to achieve the effect of reducing requirements, reducing energy loss, and reducing heat generation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
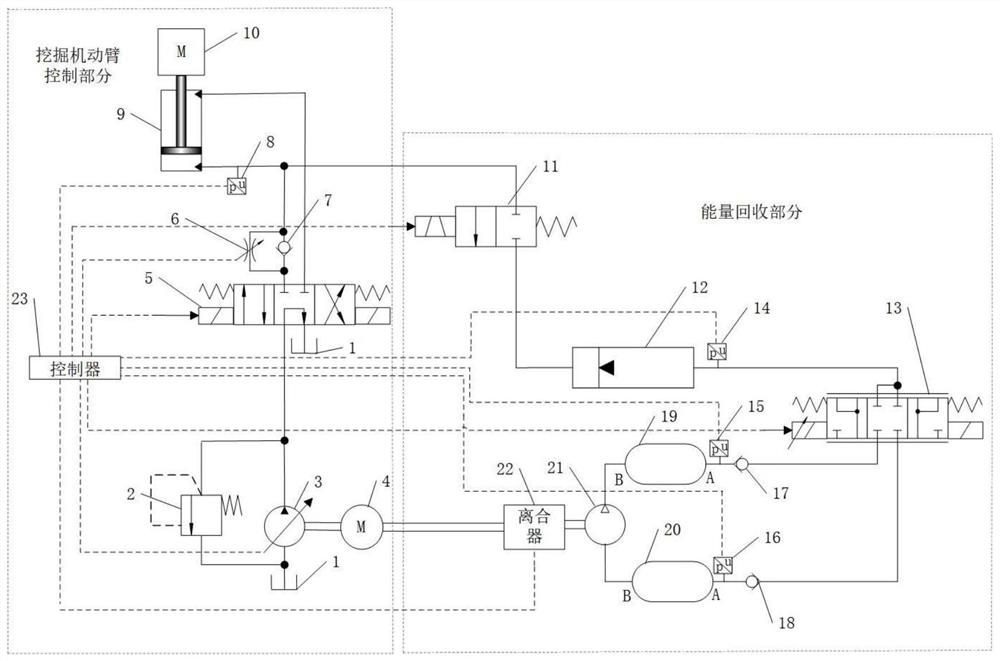
[0020] see figure 1 An energy recovery system for an excavator arm based on a variable pressure accumulator mainly includes an excavator arm control part and an energy recovery part. The boom control unit is mainly composed of fuel tank 1, overflow valve 2, hydraulic variable pump 3, engine 4, three-position four-way reversing valve 5, adjustable throttle valve 6, hydraulic check valve 7, first pressure sensor 8, dynamic The arm cylinder 9 and the controller 23 are composed, and the energy recovery part is mainly composed of the on-off valve 11, the piston accumulator 12, the pneumatic servo valve 13, the second pressure sensor 14, the third pres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More