

Indirect adaptive robust control method for electro-hydrostatic actuator
An adaptive robust, electro-hydrostatic actuation technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of system flutter, difficult to meet the high performance requirements of the system, etc., to achieve good Tracking Performance, Effects of Wide Application Prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
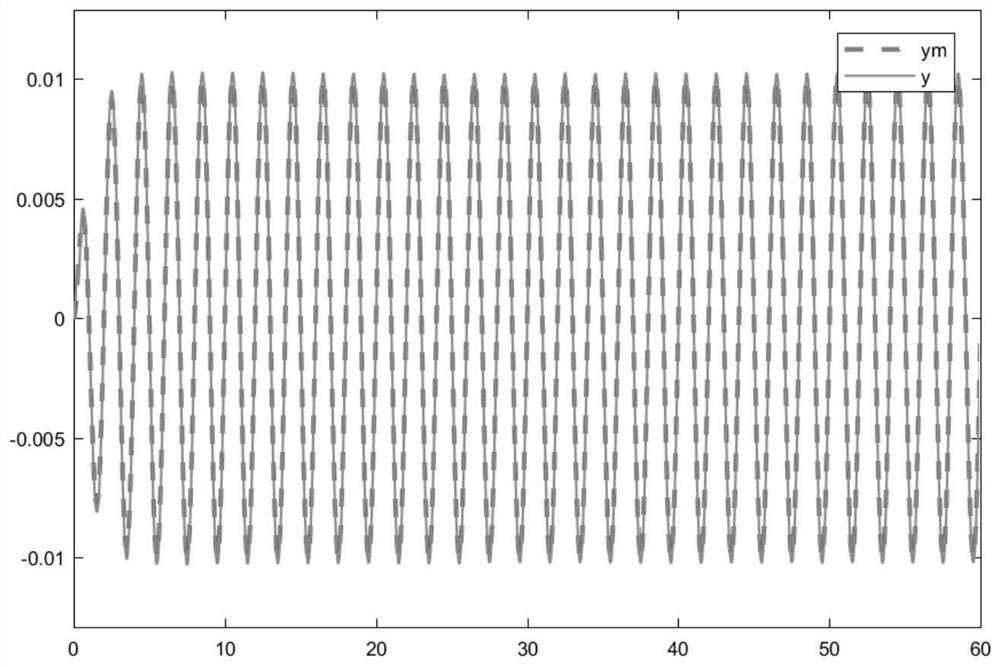
[0100] In order to verify the performance of the designed controller, the following parameters are taken in the simulation to model the electrohydrostatic actuator:
[0101] V 01 =V 02 =7.962e-5 / 2m 3 ;A=9.0478e-4m 2 ; m=30Kg; B=400N·s / m;
[0102] C t =3e-12m 5 / (N·s);β e =7e8Pa; η v =0.9; D=0.02L / min; k m =10.
[0103] Take the control parameter: k 1 =100,k 2 =500,k 3 = 10; θ min =[0.1,50,0] T , θ max =[1;1000;50] T .
[0104] Using MATLAB, use the data obtained by the system every 0.001s for simulation, given the expected command x of the system 1d =0.01sin(3.14t)[1-exp(-t)], the schematic diagram of the tracking process of the system output to the expected instruction can be obtained ( image 3 ), the parameter estimation curve of the controller ( Figure 4 ), the tracking error map of the system ( Figure 5 ). from image 3 with Figure 5 It can be seen from the figure that the tracking error of the indirect adaptive robust controller is large at the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More