

Millimeter wave radar continuous positioning method and device based on laser map
A millimeter wave radar and positioning method technology, which is applied in measurement devices, radio wave measurement systems, reflection/re-radiation of radio waves, etc., can solve the waste of resources and manpower, cannot guarantee the integrity and consistency of high-precision map construction, Millimeter wave radar data is noisy and other problems, to achieve the effect of excellent positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
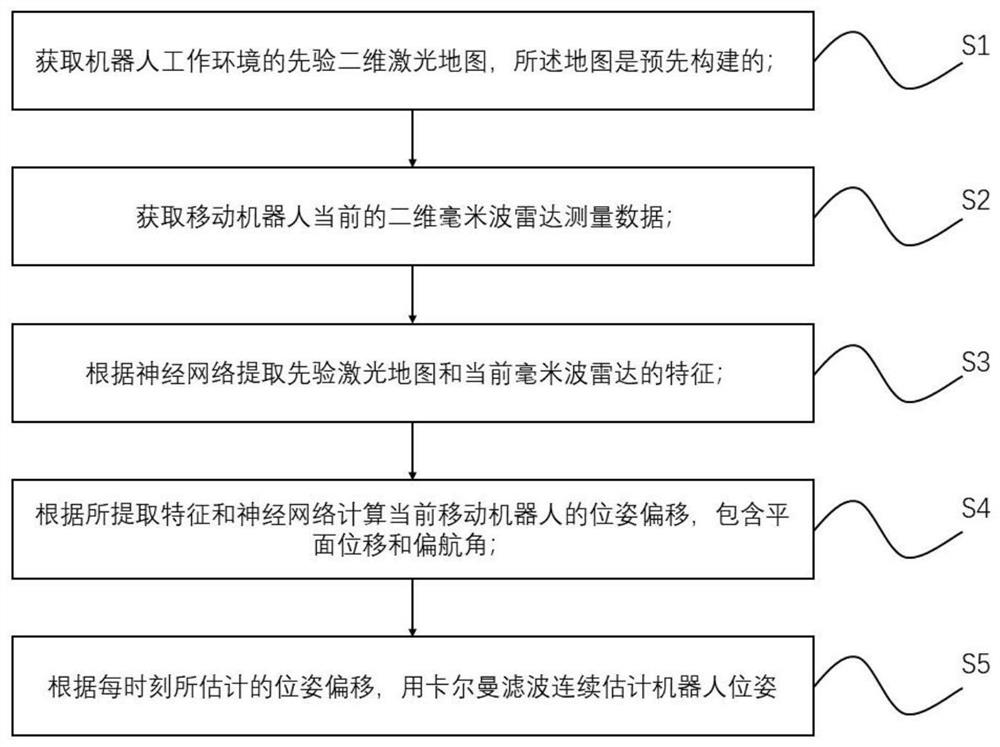
[0064] The invention discloses a laser map-based millimeter wave radar continuous positioning method and device. The method comprises: 1) obtaining a priori two-dimensional laser map of the working environment of the robot, and the map is pre-built; the priori two-dimensional laser map:
[0065] According to the calibration relationship between the millimeter-wave radar sensor and the laser sensor, the laser point cloud is highly filtered to filter out areas that cannot be detected by millimeter-wave radar sensors such as the ground;
[0066] According to the filtered laser point cloud, a three-dimensional laser point cloud map is constructed by laser SLAM and other technologies;
[0067] According to the constructed 3D laser point cloud map, it is converted into a 2D raster image by rasterization for subsequent millimeter-wave radar positioning.
[0068] 2) Obtain the current two-dimensional millimeter-wave radar measurement data of the mobile robot;
[0069] 3) Extract the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More