

Structured light hand-eye calibration method based on coordinate system servo alignment
A technology of hand-eye calibration and structured light, which is applied in the field of computer vision, can solve the problems that the calibration accuracy depends on the professional level of the operator, the result consistency is poor, and the accuracy is insufficient, so as to achieve a high degree of automation, good consistency, and reduce the dependence on the technical level. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The invention will be further described in detail below with reference to the accompanying drawings and examples.
[0052] Establish design and user coordinate system 1. The calibration block
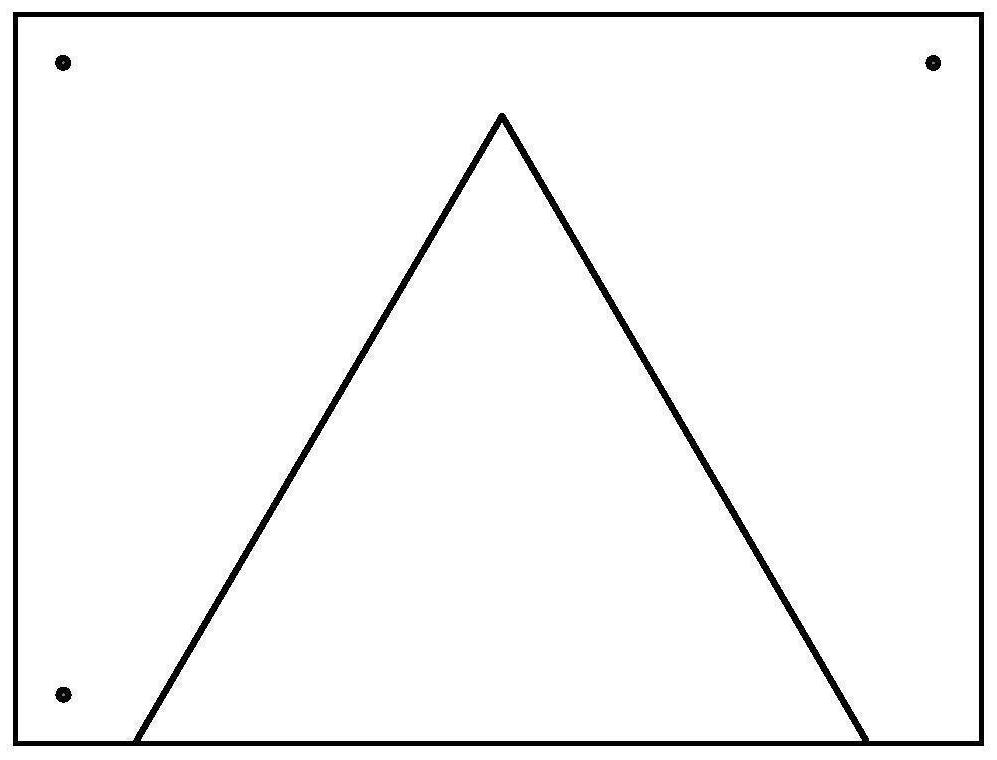
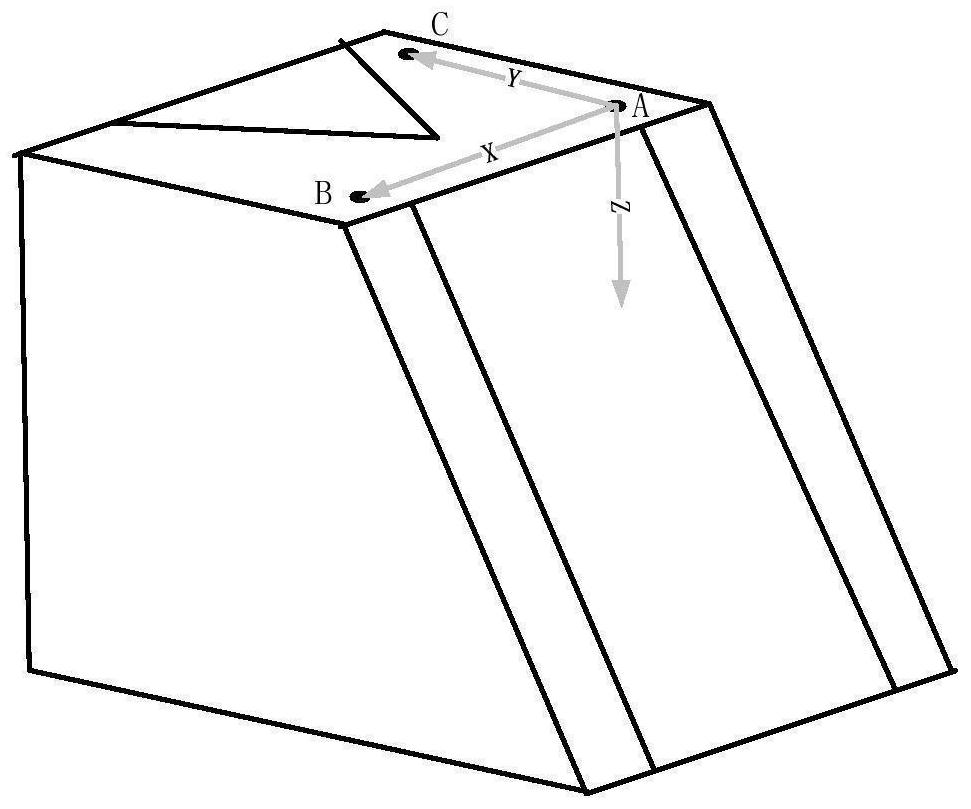
[0053] Light applied to the robot structure and a three-dimensional hand-eye camera calibration method, using a calibrated geometrical information block of specially designed, highly accurately estimate a three-dimensional structure of the light relative pose of the camera coordinate system; calibration block mainly comprising a special design on the surface and the ramp surface, the surface having three circular holes and grooves of an isosceles triangle, with a ramp surface on which the parallel groove; figure 1 Shows a schematic view of the surface of the calibration block, three circular holes is used to establish the robot coordinate system user (user coordinate system calibration block), is also used to estimate the relative attitude offline rx, rz, isosceles triangle recess fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More