Multifunctional foot-changing robot
A robot, multi-functional technology, applied in the field of robots, can solve the problems of restricted movement, insufficient carrying capacity, and few functions, achieve high work efficiency, strong ability to adapt to harsh terrain environments, and improve adaptability and stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
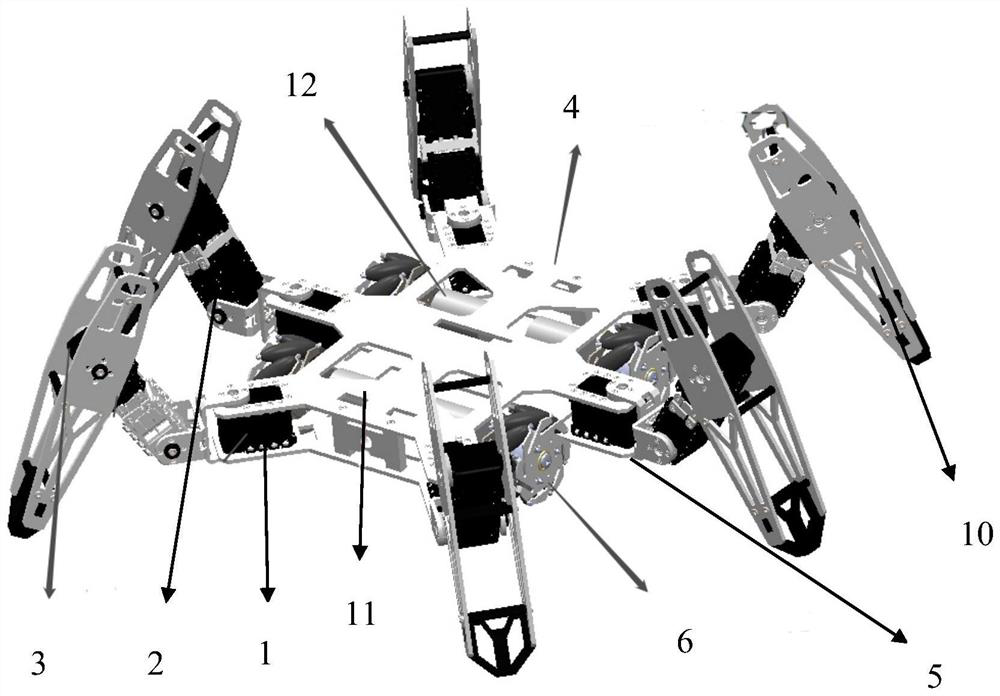
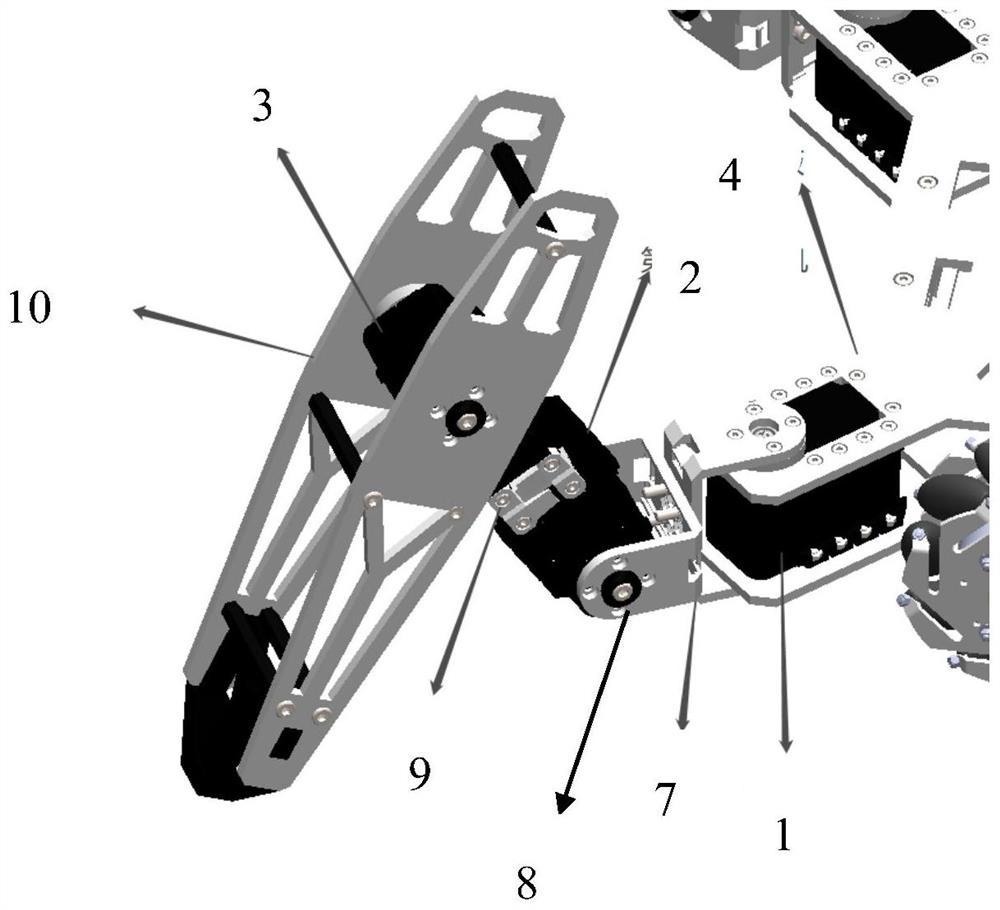
[0030] The fuselage of the multifunctional foot changing robot of the present embodiment is made up of three parts: main body, six mechanical legs and four mecanum wheels 6, as figure 1 shown. Its main body looks exactly like an H-shaped trolley chassis, and is formed by connecting two upper and lower plates of a hexagon with a symmetrical structure. The main body is used to connect and carry. On the upper board 4, as the installation control board, the fixed surface of the battery is also the installation and connection position of six first high-voltage steering gears 1 in the middle of the two boards. And four mecanum wheels 6 are hidden in the bottom of the main body, and the wheels are symmetrically distributed, connected on four motors 12 connected and installed on the lower plate, and the motor adopts bolt connection to be fixed on the lower plate.
[0031] The shape of the main body is an octagon with central axis symmetry. On its left and right sides, a machine leg ...
Embodiment 2
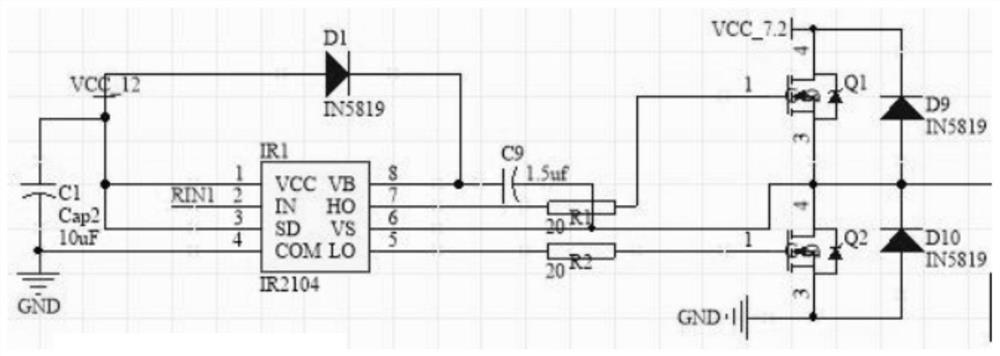
[0036] This embodiment is the design of the control system of the multi-functional variable foot robot. The control system design of the leg-wheel hybrid hexapod robot chooses embedded as the main processing system. The hardware part includes STM32F4ARM control board, power module, temperature and humidity sensor, MPU6050 six-axis sensor, 2.4G module nRF24L01, motor, steering gear, steering gear control board, motor drive module, camera 11 and transmitter. The overall framework of the hardware part of the control system is as follows: Figure 5 shown.
[0037] The main control system is composed of LPC546 and Raspberry Pi 4B: LPC546 is used as a motion control system; Raspberry Pi is used as a server to send or receive data to the client.
[0038] 1) Main control chip
[0039] This project chooses the Raspberry Pi series as the core development platform. Raspberry Pi is a micro-card computer with the size of a bank card. It can run Linux systems and windows IOT systems, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com