

Force feedback end holder admittance control method
A control method and force feedback technology, applied in the direction of manufacturing tools, claw arms, manipulators, etc., can solve problems such as organ tearing, puncture failure, and lower system positioning accuracy, so as to weaken the interaction force, reduce mutual pulling, and improve puncture The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
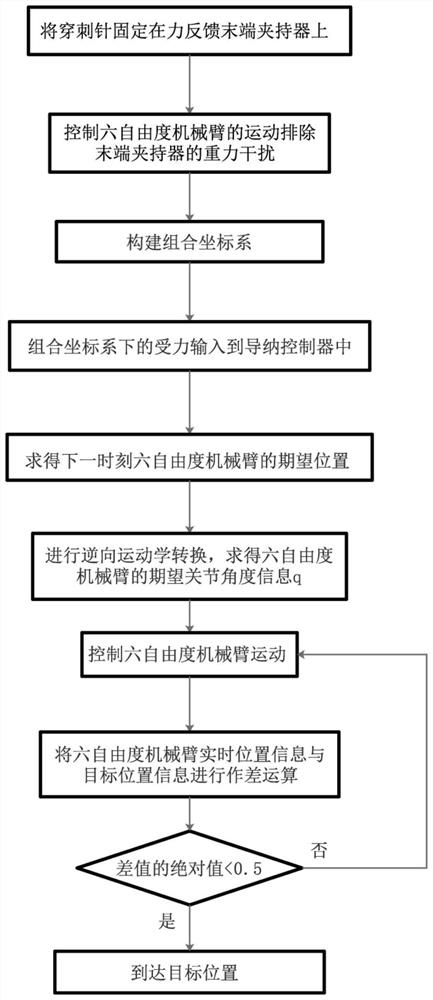
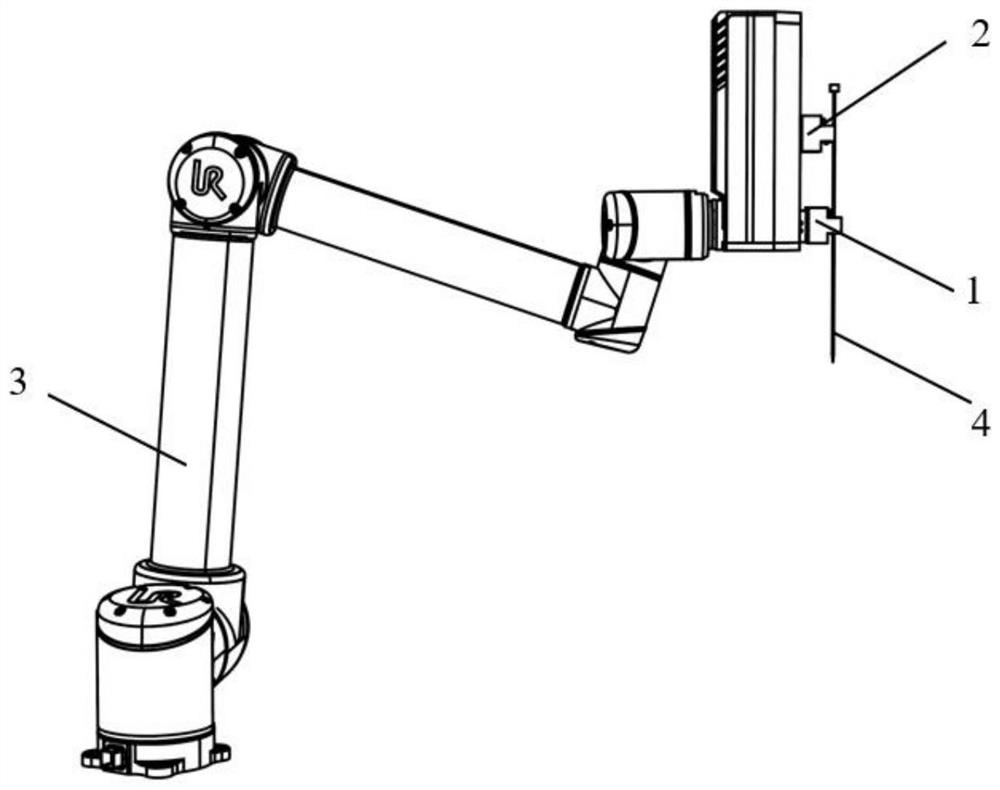
[0053] see figure 1 with figure 2 As shown, the method for controlling the admittance of the force feedback end gripper provided in this embodiment requires the use of a force feedback end gripper with a lower leading end three-dimensional force sensor 1 and an upper holding end three-dimensional force sensor 2 and a puncture Needle surgery tool 4, the force feedback end holder is fixed at the end of the six-degree-of-freedom mechanical arm 3, and the puncture needle surgery tool 4 is fixed on the force feedback end holder for detecting the force applied by the outside world. When the puncture needle surgical tool 4 is under force, the two three-dimensional force sensors on the force feedback end gripper can collect corresponding force signals in real time; it specific...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More