

Hydraulic control system suitable for pressing artillery and control method of hydraulic control system
A hydraulic control system and artillery technology, which is applied to fluid pressure actuation system components, fluid pressure actuation devices, servo motors, etc., and can solve problems such as increased difficulty in debugging control parameters, long dynamic adjustment time, and system instability , to achieve the effect of strengthening the anti-shock ability, reducing adverse effects, and improving smoothness and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
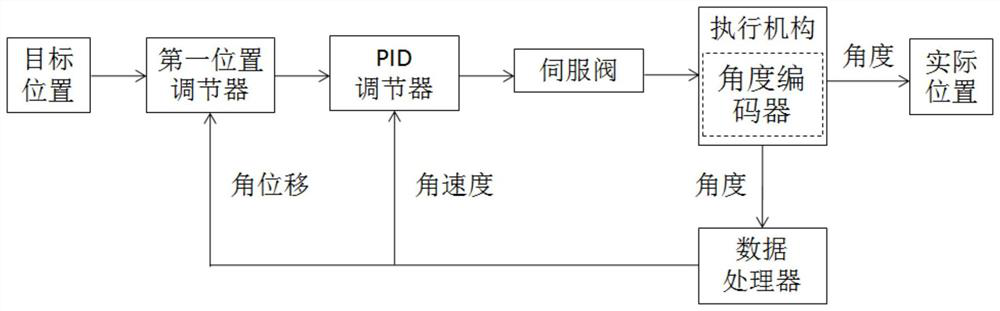
[0034] figure 1 It is a schematic diagram of the structure and working principle of the traditional hydraulic control system. It can be seen from the figure that the traditional hydraulic control system directly feeds back the angle value obtained in the position loop to the position regulator and PID regulator 2. Due to the strong hysteresis and nonlinearity of each link of the hydraulic system, it causes dynamic adjustment. A series of problems such as long time, unstable system, vibration of speed ring, etc.
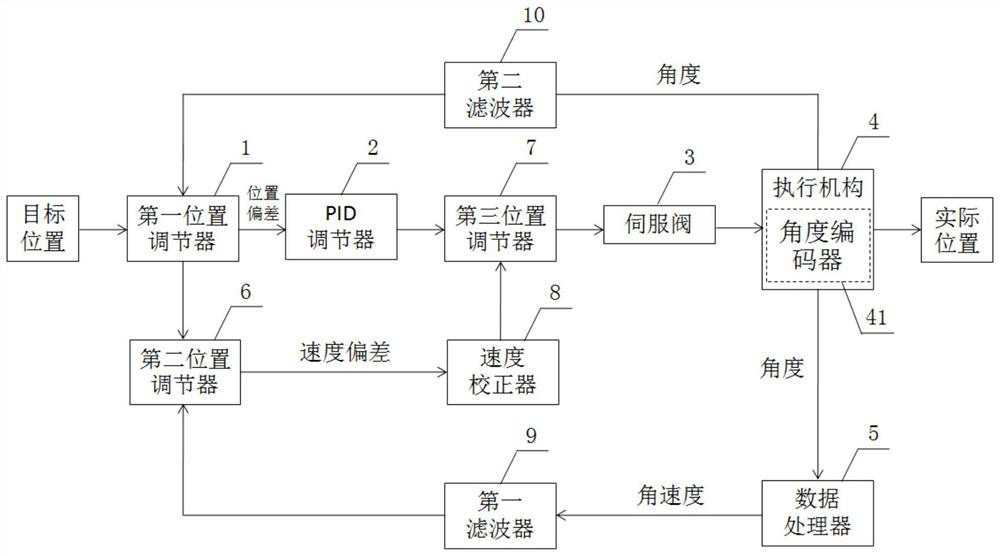
[0035] In order to solve the shortcomings of the traditional hydraulic control system, this embodiment improves a hydraulic control system suitable for suppressing artillery reference figure 2 , including a first position regulator 1, a PID regulator 2, a servo valve 3, an actuator 4, a data processor 5, a second position regulator 6, a third position regulator 7 and a speed corrector 8; the first The position regulator 1, the PID regulator 2, the servo valve 3 and...
Embodiment 2
[0040] A control method for a hydraulic control system suitable for suppressing artillery, comprising the following steps:
[0041] Step 1: Obtain the angle value of the suppressed gun barrel from the angle encoder, and feed back the angle value to the first position regulator;
[0042] Step 2: using the data processor to perform differential processing on the angle value to obtain the angular velocity of the suppressed gun barrel, and send the angular velocity to the second position regulator;
[0043] Step 3: Obtain the target position of the suppressed artillery barrel, and obtain the position deviation of the suppressed artillery barrel by using the first position regulator, the target position and the angle value;
[0044] Step 4: Calculate and obtain the target speed for suppressing the gun barrel according to the position deviation;
[0045] Step 5: Using the second position regulator to compare and analyze the target speed and angular speed to obtain a speed deviation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More