Distributed control method for integrated mobile robot
A mobile robot and distributed control technology, applied in computer control, program control, general control system, etc., can solve problems such as complex kinematics model, high power consumption of electronic control part, and difficulty in meeting control requirements, so as to improve real-time control performance, reduce system complexity, and enhance system reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] An integrated mobile robot distributed control method of the present invention specifically comprises the following steps:
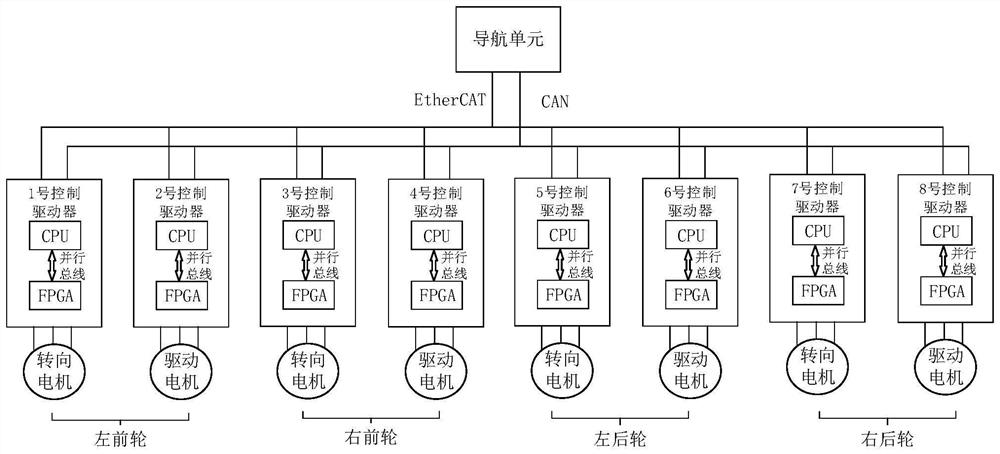
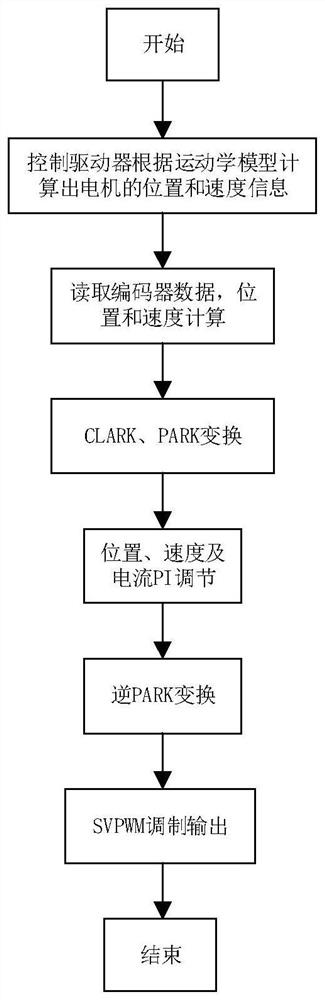
[0100] S1, the traditional motion controller and servo driver are integrated to form a control driver, which simplifies the traditional three-layer control system structure into two layers, reducing the system complexity;
[0101] S2, based on the control driver, implemented the distributed control of the wheeled mobile robot, which improved the real-time control performance and enhanced the system reliability;
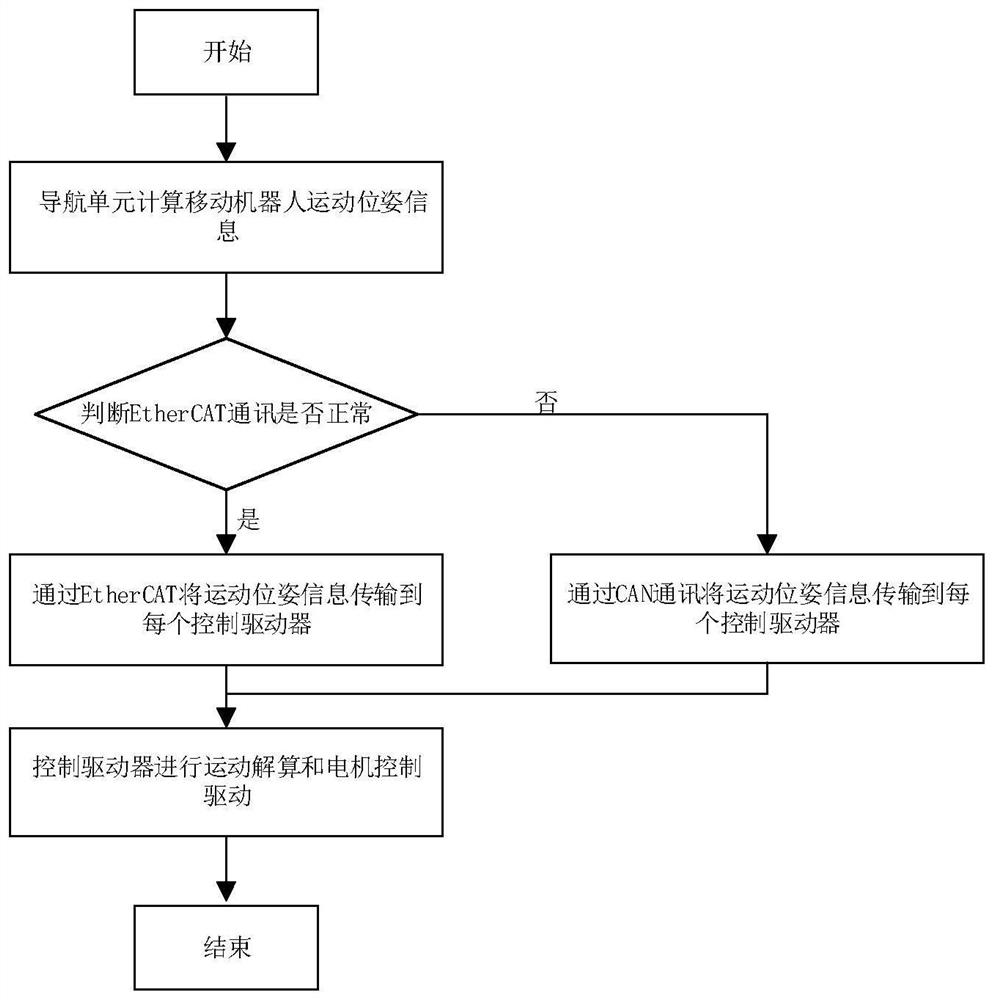
[0102] S3, using EtherCAT and CAN dual-bus redundant communication, which improves communication reliability;
[0103] Preferably, step S1 integrates the traditional motion controller and the servo driver to form a control driver, simplifies the traditional three-layer control system structure into two layers, and reduces the system complexity. Specifically, it refers to: canceling the traditional mobile robot motion The controller hardw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com