

Flexible pneumatic capturing mechanism for capturing non-cooperative target in space
A non-cooperative target, space capture technology, applied in the field of flexible pneumatic capture mechanisms, can solve the problems of limited capture force, incompetence in releasing non-cooperative targets, and more energy consumption, achieving low cost and structural designability. Strong, small loading effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
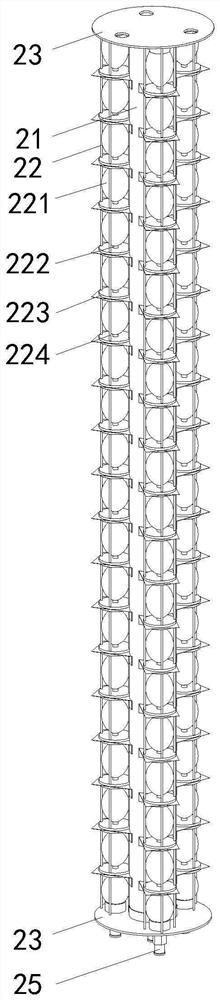
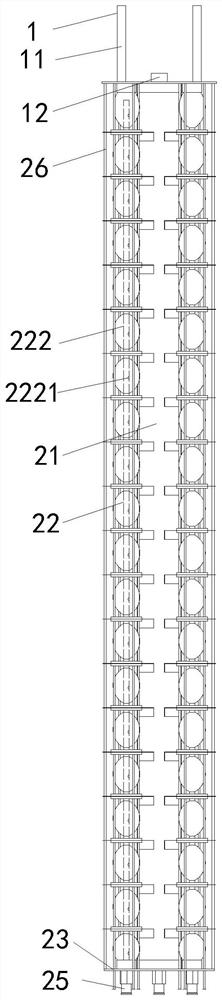
[0032] Embodiment one: refer to Figure 1 to Figure 3 , a flexible pneumatic capture mechanism for capturing non-cooperative targets in space, including an extension mechanism 2 and a capture device 1, one end of the extension mechanism 2 is connected to a capture satellite, and the other end of the extension mechanism 2 is installed with the capture device 1, The stretching mechanism 2 includes a flexible protective cover 26, a main airbag 21, a secondary airbag 22 and two end caps 23; the main airbag 21 is the main body of the stretching mechanism 2, and can be expanded and stretched after being inflated, and the secondary airbag 22 is stretched. The steering control part of the mechanism 2, the main airbag 21 and the secondary airbag 22 two ends are all connected with end caps 23, and utilize the end cap 23 positioned at the tail end to be connected with the capture satellite, utilize the end cap 23 positioned at the head end to install the capture device 1, The flexible pr...
Embodiment 2
[0041] Embodiment two: refer to Figure 4 to Figure 6 A plurality of main airbags 21 are arranged around the outside of one auxiliary airbag 22, each main airbag 21 is a cylindrical air column, and the auxiliary airbag 22 is a multi-cavity air column. Other compositions and connection methods are the same as those in Embodiment 1.
[0042] In this embodiment, a plurality of connectors 24 are uniformly and fixedly arranged along the axial direction of the auxiliary airbag 22 to form a "lotus root" multi-cavity auxiliary airbag 22, which is connected to a plurality of main airbags 21 through the connectors 24. The secondary airbag 22 is built with an inflation hose 222 , and the inflation hose 222 is provided with an air hole 2221 in each cavity of the secondary airbag 22 for inflating and deflating the secondary airbag 22 .
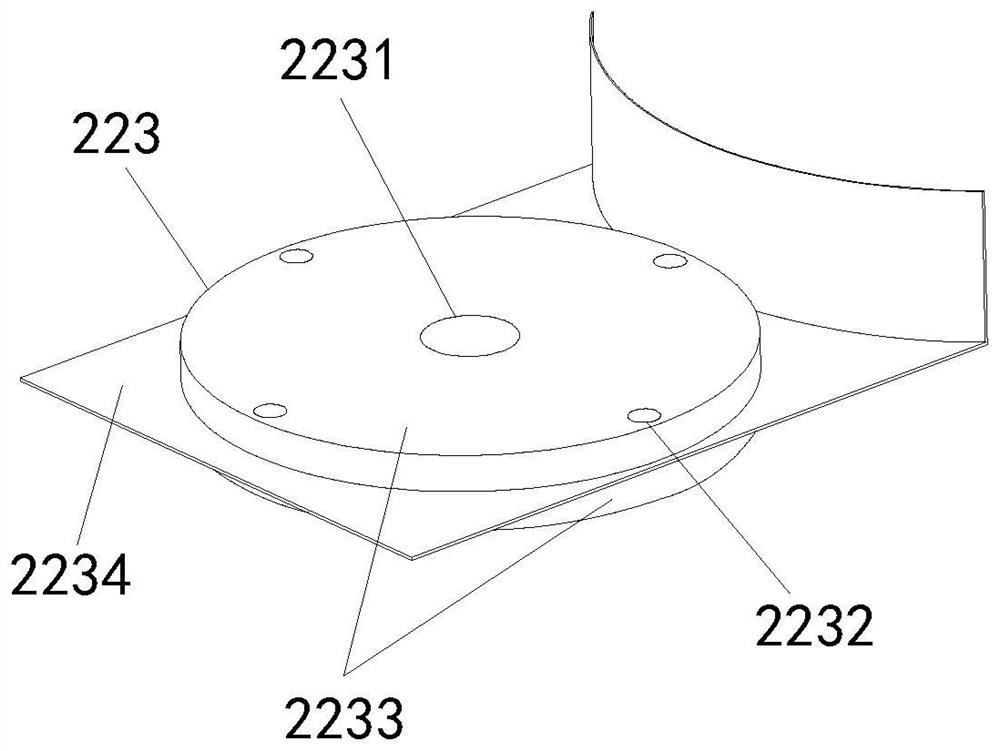
[0043]In this embodiment, each of the connectors 24 includes a blocking ring 241 arranged in the center, a plurality of connecting rings 242 arranged aro...
Embodiment 3
[0044] Embodiment three: refer to Figure 7 , the main airbag 21 is a cylindrical air column, three groups of auxiliary airbags 22 are arranged on the side wall of the main airbag 21, and each group of auxiliary airbags 22 includes a plurality of single-chamber bladders 225 arranged axially along the main airbag 21 , the multiple single-chamber balloons 225 in the same group communicate through the air tube 226 , and the air tube 226 is also arranged on the side wall of the main air bag 21 . Other compositions and connection methods are the same as those in Embodiment 1.
[0045] In Embodiments 1, 2, and 3, the main airbag 21 and the auxiliary airbag 22 are all made of flexible composites resistant to space environments, including but not limited to polyimide films, polyester films, PVDF, PVF films, and the like.
[0046] The end cover 23 is made of carbon fiber composite material or lightweight metal material, such as titanium alloy, metal honeycomb panel, carbon fiber honey...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More