

Electric power inspection robot system based on three-dimensional laser radar and mapping method
A robot system and inspection robot technology, applied in radio wave measurement system, control/adjustment system, two-dimensional position/channel control, etc. Inaccurate data and other problems, to achieve clear structural features, high real-time performance, and improve control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
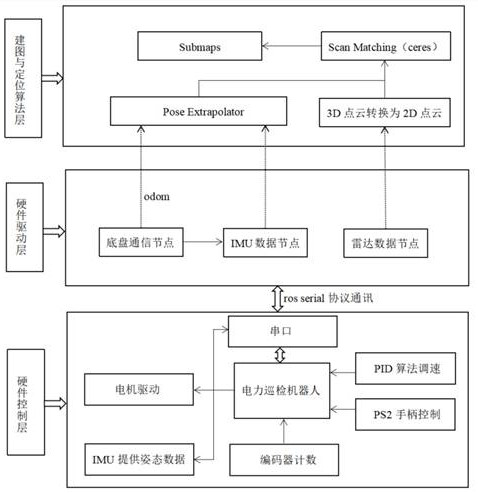
[0038]A kind of power inspection robot system based on three-dimensional laser radar of the present invention, see figure 1 As shown, the system architecture described in the present invention includes a hardware control layer, a hardware driver layer, and a mapping and positioning algorithm layer.
[0039] The hardware control layer has a PS2 handle that sends control signals to the power inspection robot, and uses the PID algorithm to adjust the speed through the working state of the motor driven by the motor, and then controls the motion of the power inspection robot. At the same time, the encoder and IMU are used to obtain the speed and attitude of the power inspection robot, and the speed and attitude data are sent to the hardware driver layer through the ros serial protocol. The hardware driver layer obtains the wheel odometer (odom) through the chassis communication node Information, IMU data information, 3D point cloud data is obtained through the radar data node, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More