

Point cloud accelerated registration method
A point cloud and source point technology, applied in the field of image processing, can solve the problems of point cloud density and noise, poor robustness, information loss, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
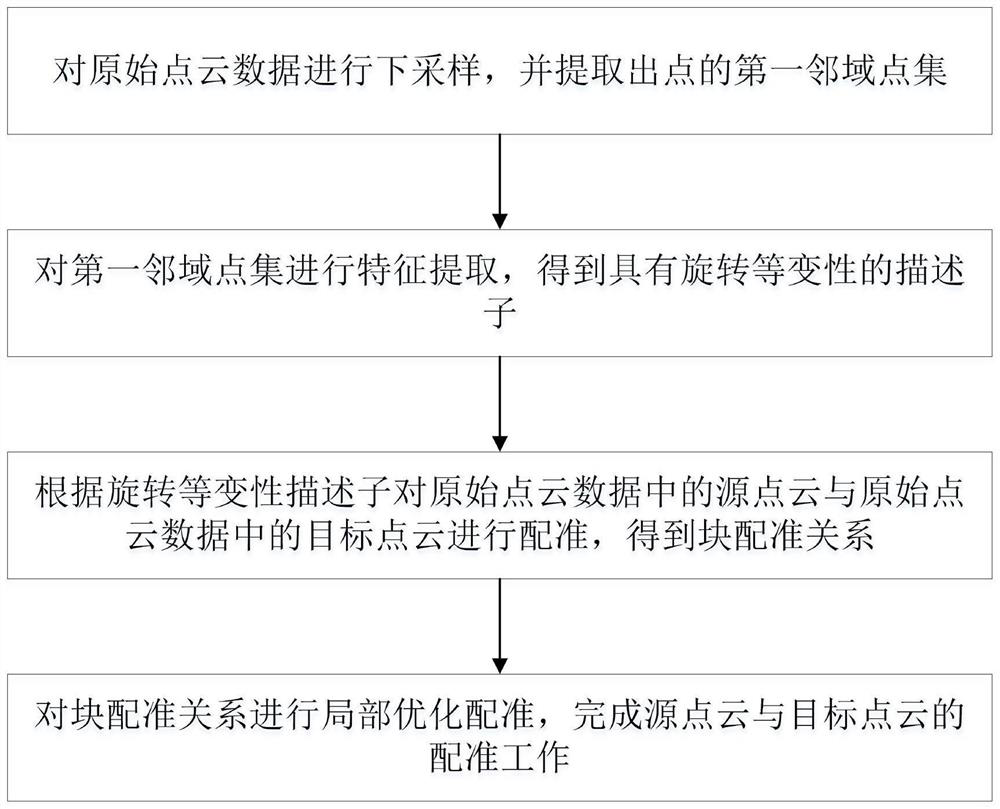
[0047] Such as figure 1 Shown is an embodiment of a point cloud accelerated registration method, comprising the following steps:
[0048] S1: Downsample the original point cloud data, and extract the first neighbor point set of the point; the amount of data after downsampling can be greatly reduced, which can greatly improve the registration calculation speed;
[0049] S2: Use the icosahedron group to perform feature extraction on the first neighborhood point set to obtain a descriptor with rotational equivariance;
[0050] S3: Register the source point cloud in the original point cloud data with the target point cloud in the original point cloud data according to the rotation equivariance descriptor, and obtain the block registration relationship;
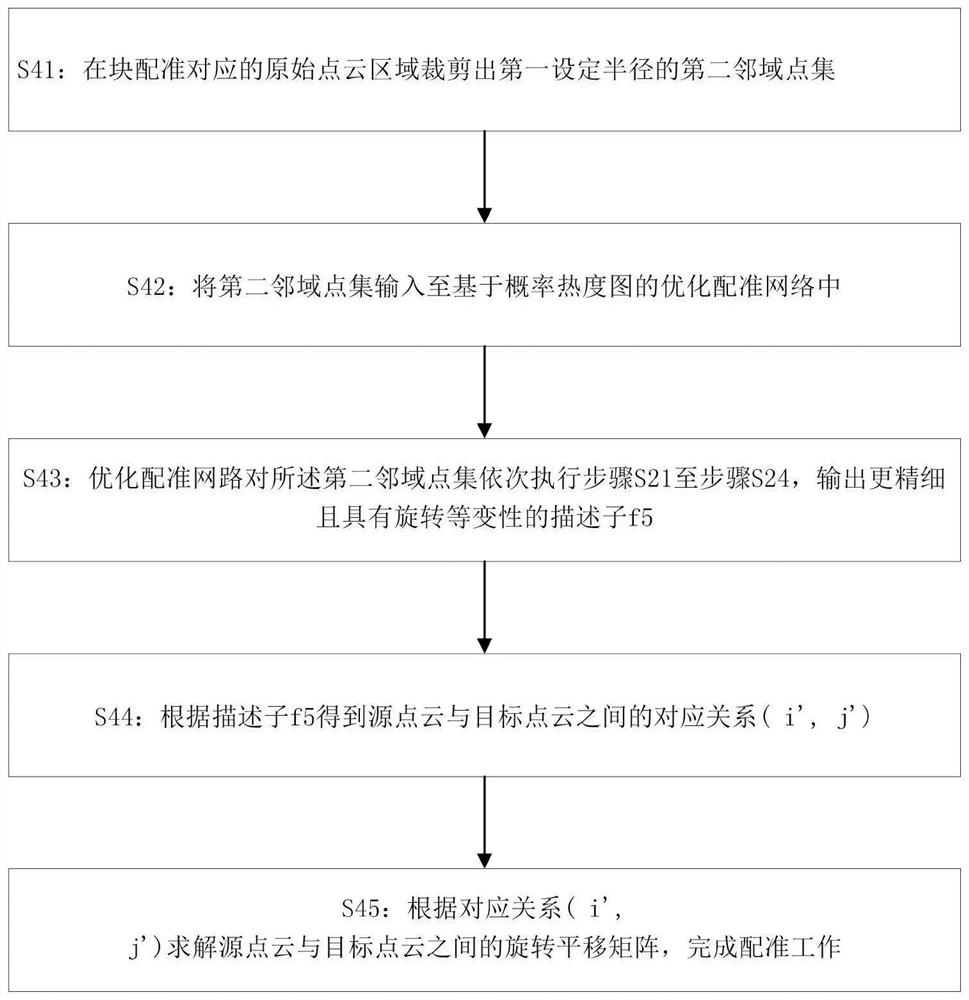
[0051] S4: Perform local optimization registration on the block registration relationship, and complete the registration work of the source point cloud and the target point cloud.
[0052] Step S2 in this embodiment specifically...
Embodiment 2
[0084] The difference between this embodiment and Embodiment 1 is that the feature extraction network in step S22 of this embodiment is PointNet. Of course, the use of PointNet as the feature extraction network in this embodiment is only a reference implementation, and other feature extraction networks can also be used in the specific implementation process, which is not limited here.
Embodiment 3
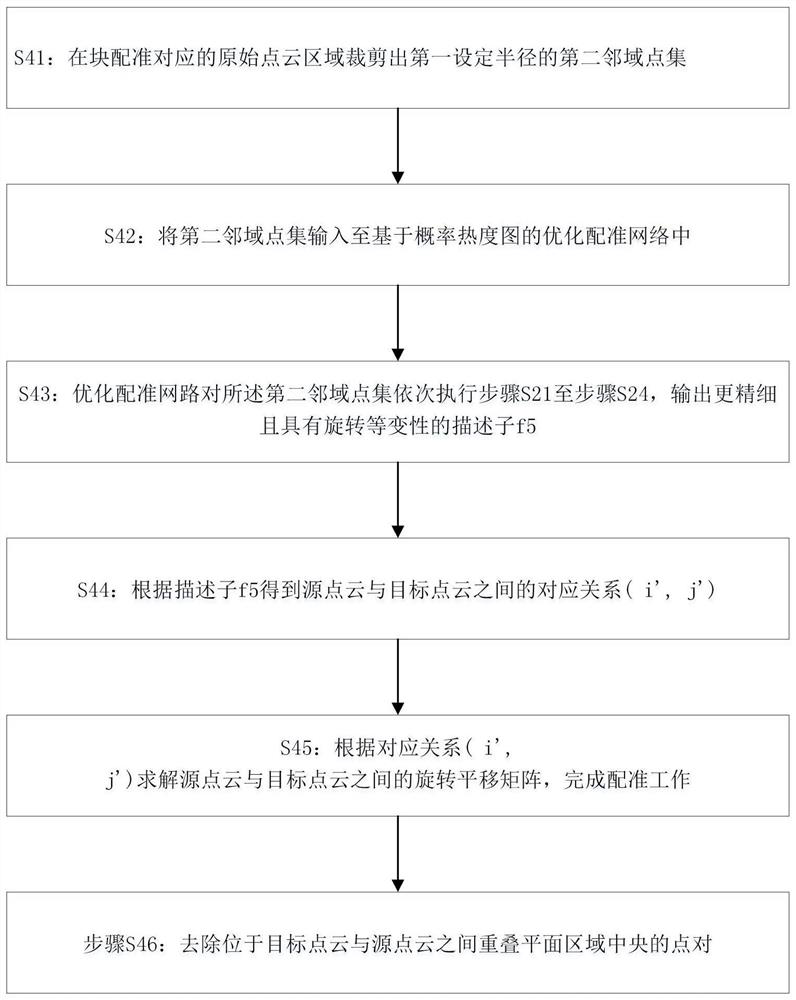
[0086] The difference between this embodiment and embodiment 1 or embodiment 2 is that step S4 in this embodiment also includes step S46: remove the point pair located in the center of the overlapping plane area between the target point cloud and the source point cloud. In this way, it is possible to avoid the influence of the point pairs located in the center of the overlapping plane area that do not have good specificity on the registration accuracy.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More