

PMSM speed and position estimation method based on parameter adaptive EKF
A self-adaptive, speed technology, applied in the control of electromechanical transmission, control of generator, electronic commutation motor control, etc., can solve the problems of increasing the size and cost of the motor, affecting speed and position estimation, and reducing the accuracy of filter estimation, etc. Achieve strong self-adaptive ability and anti-interference ability, accurate measurement, and improve the effect of system robustness and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
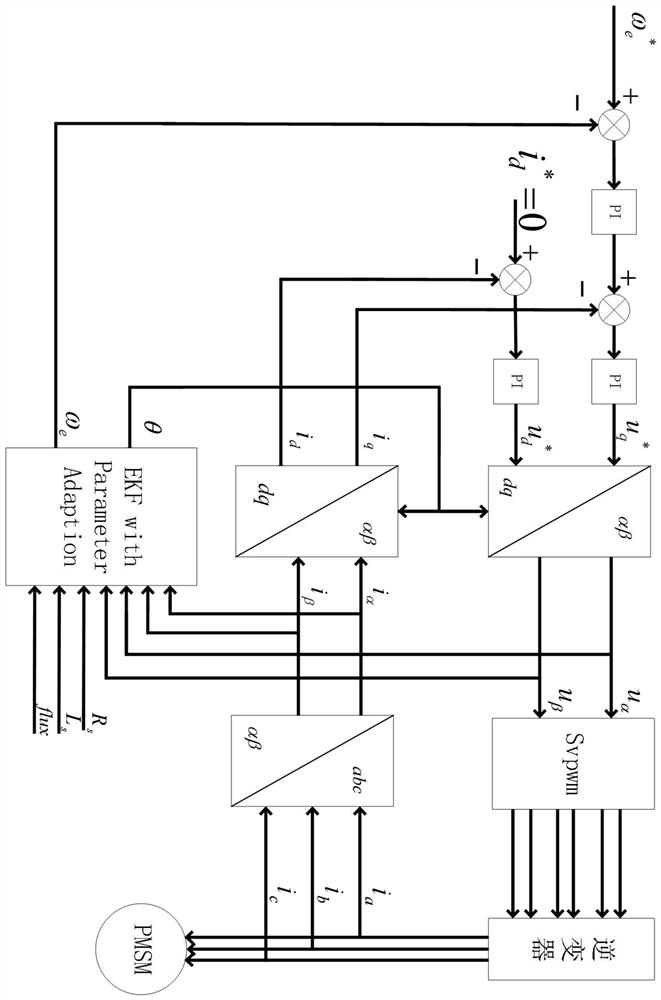
[0052] Such as figure 1 As shown, a PMSM speed and position estimation method based on parameter adaptive EKF includes the following steps:
[0053] Step 1. First, the obtained three-phase current i of the surface-mounted permanent magnet synchronous motor a i b i c Through the Clarke transformation, the current i in the two-phase stationary coordinate system is obtained α i β , and then the current i in the two-phase stationary coordinate system α i β ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More