

Dynamic position and attitude synchronization measurement method fusing inertial measurement information
A dynamic position and inertial measurement technology, applied to measurement devices, navigation through velocity/acceleration measurement, mapping and navigation, etc., can solve problems such as inability to meet accuracy requirements, limitations, and low measurement frequency, and achieve measurement accuracy and real-time performance. The effect of improving the performance, reducing the dynamic error, and improving the data rate of the pose measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] An embodiment of the present invention provides a dynamic position and attitude synchronization measurement method fused with inertial measurement information, see Figure 1-Figure 4 , the method includes the following steps:
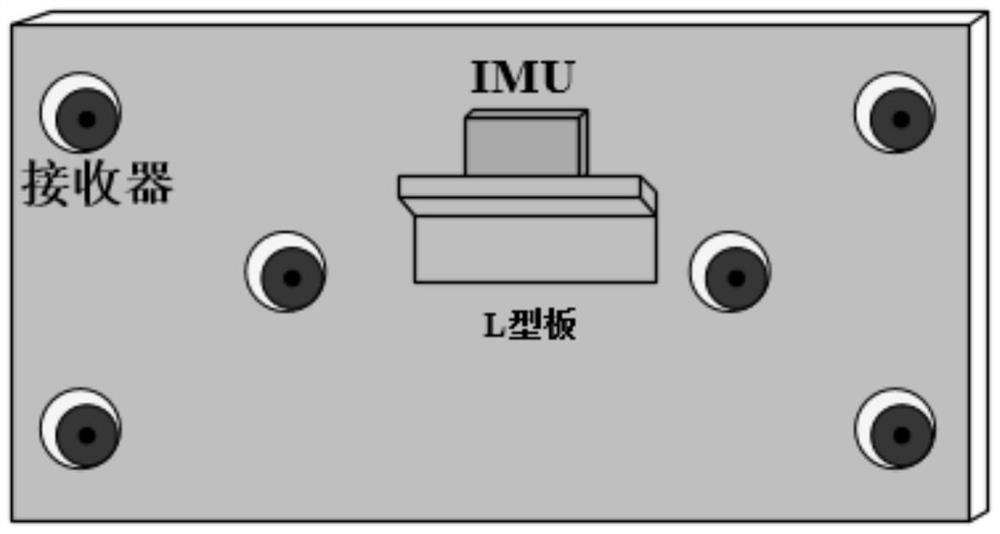
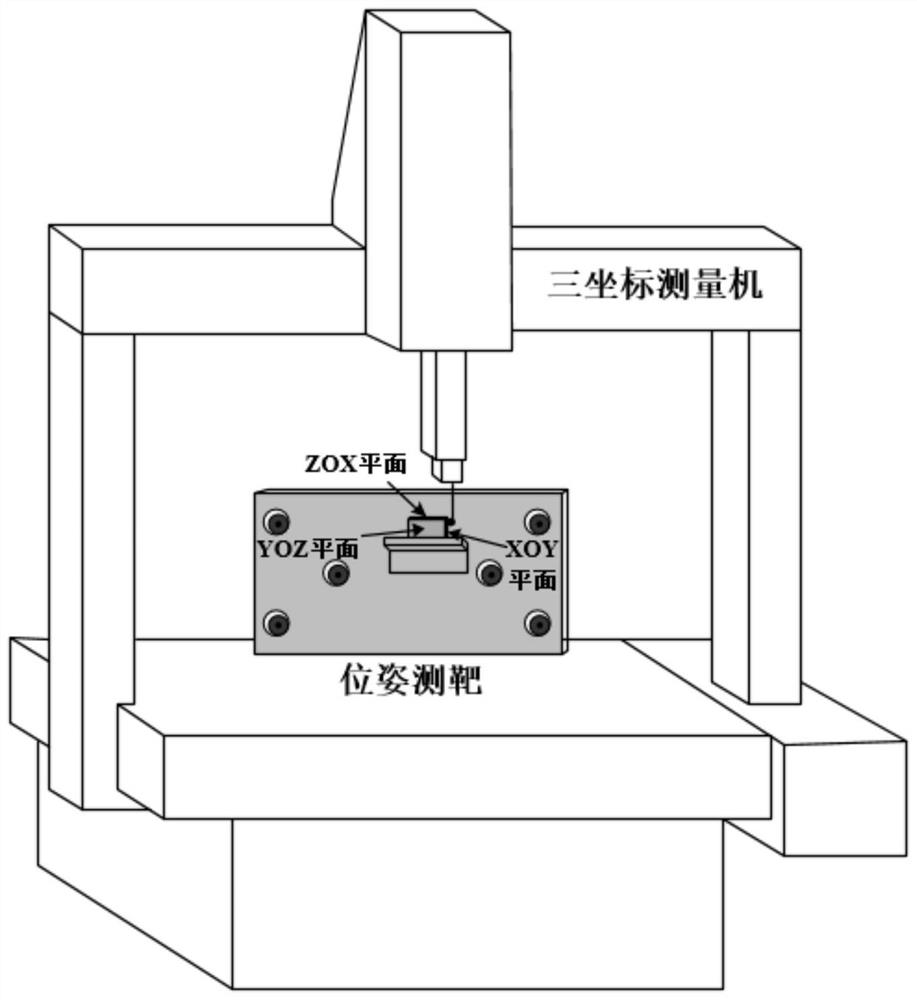
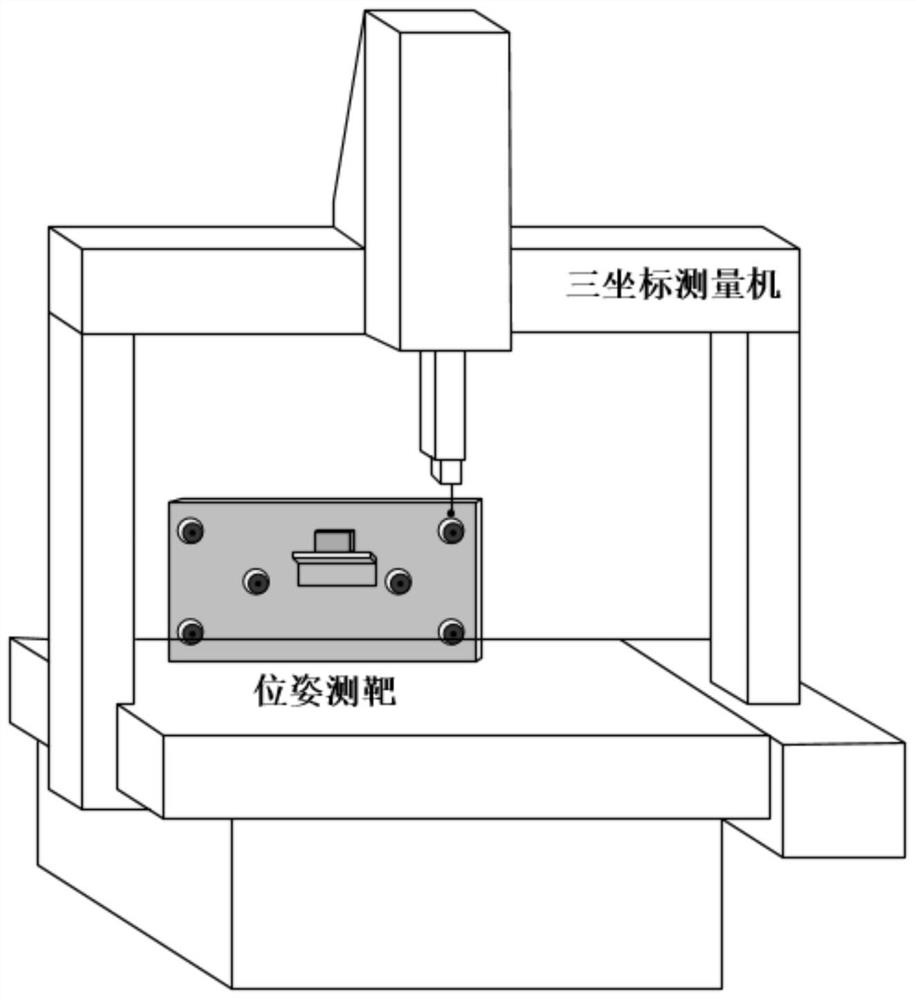
[0030] 101: Rigidly connect the position and attitude measurement target formed by the IMU and the wMPS photoelectric receiver, and use a three-coordinate measuring machine to measure the coordinates of the center of the photoelectric receiver and fit the IMU's own coordinate system to realize the unification of the observation objects of the wMPS and the IMU;
[0031] 102: Place the rigidly connected pose measurement target on the target to be measured and move with the target, use the laser transmitting station to measure the scanning angle of each receiver, and construct the geometric constraint relationship of the light plane; take the wMPS pose observation at the initial position as The initial value of the IMU state is updated, and the IMU ...
Embodiment 2
[0043] The following combined with specific examples, Figure 1-4 1. The specific calculation formula further introduces the scheme in Embodiment 1, see the following description for details:
[0044] Step 201: Arrange N transmitting stations in the space according to the requirements of measurement accuracy and range, and determine the rotation and translation relationship between the N transmitting stations and the global coordinate system by using the existing control field calibration method or standard scale calibration method;
[0045] Wherein, the step 201 is well known to those skilled in the art, and will not be described in detail in this embodiment of the present invention.
[0046] Step 202: Use 6 wMPS photoelectric receivers to form a pose measurement target, and rigidly connect the IMU to the pose measurement target (such as figure 1 As shown), use a three-coordinate measuring machine to measure the spherical center coordinates of the six photoelectric receivers...
Embodiment 3
[0103] Below in conjunction with specific data, the scheme in embodiment 1 and 2 is carried out feasibility verification, see the following description for details:
[0104] The high-precision linear guide is used to verify the dynamic measurement accuracy of wMPS assisted by IMU. The straightness error of the linear guide is measured by laser interferometer, and the maximum error is less than 0.05mm. The wMPS position and attitude measurement target is fixed on the linear guide rail translation platform for linear motion, and the wMPS and IMU data are combined to solve the spatial position of the position and attitude measurement target. The IMU measurement frequency is set to 80Hz. Using multiple measurement points on the motion trajectory to fit the spatial straight line, calculate the straightness error at each measurement point, and use the straightness RMSE (root mean square error) as a characterization index of the dynamic measurement error in the whole motion process. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More