

Polishing line setting and control method for helmet manufacturing
A control method and helmet technology, which is applied in the directions of automatic grinding control device, workpiece feed movement control, and tool manufacturing, can solve the problems of lower product yield, high labor intensity of employees, and large loss of tools and consumables, etc., to achieve Improve yield rate and quality consistency, reduce labor costs, and improve production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
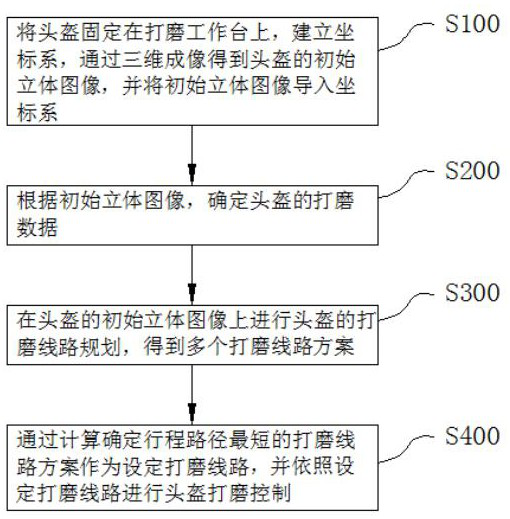
[0053] like figure 1 As shown, the embodiment of the present invention provides a polishing circuit setting and control method for helmet manufacturing, including the following steps:
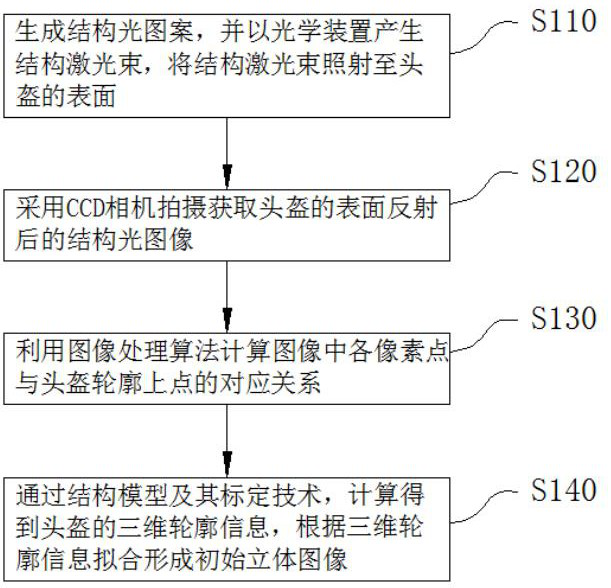
[0054] S100: Fix the helmet on the grinding table, establish a coordinate system, obtain the initial stereoscopic image of the helmet through three-dimensional imaging, and import the initial stereoscopic image into the coordinate system;
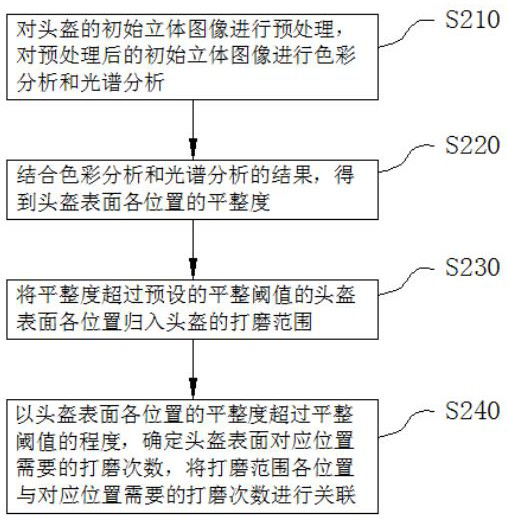
[0055] S200: Determine the polishing data of the helmet according to the initial stereo image;
[0056] S300: Plan the polishing route of the helmet on the initial stereo image of the helmet, and obtain multiple polishing route plans;
[0057] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More