

High-flexibility seven-degree-of-freedom wheel-foot robot leg structure
A high-flexibility, robotic technology, applied in the field of robotics, can solve the problems of limited freedom, insufficient flexibility, and poor practicability, and achieve the effects of large movement space, high flexibility, and good robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
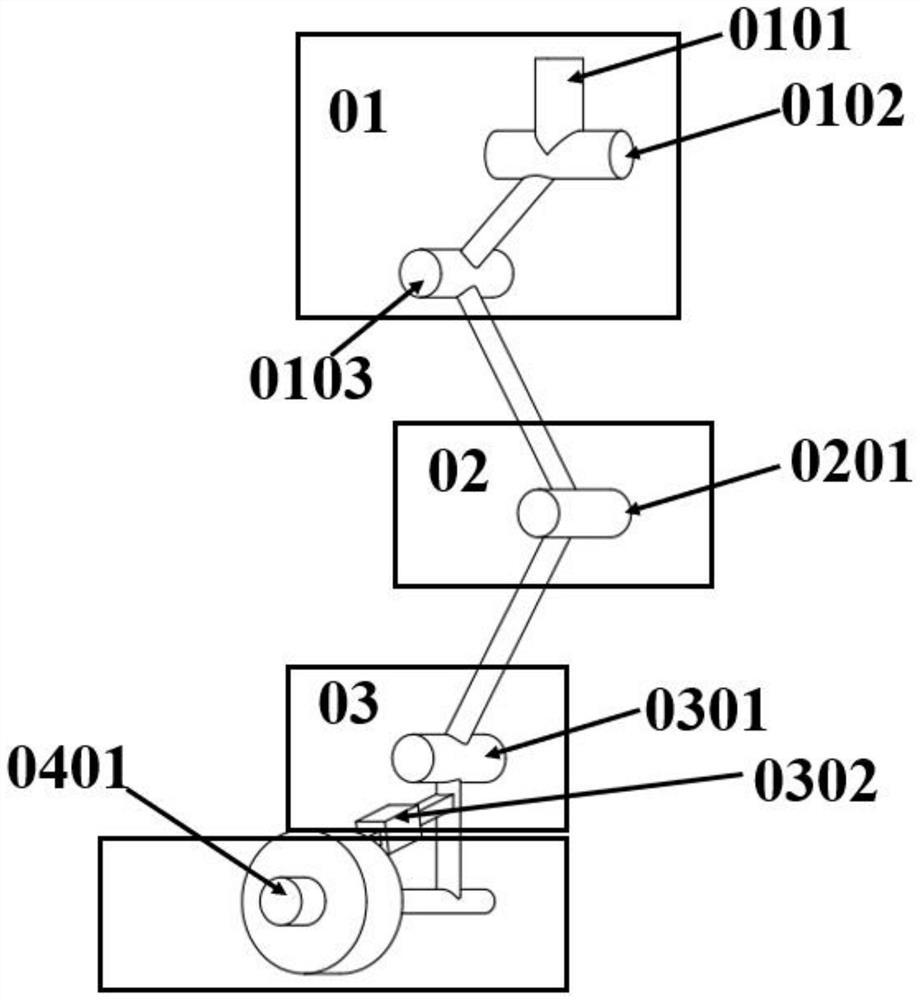
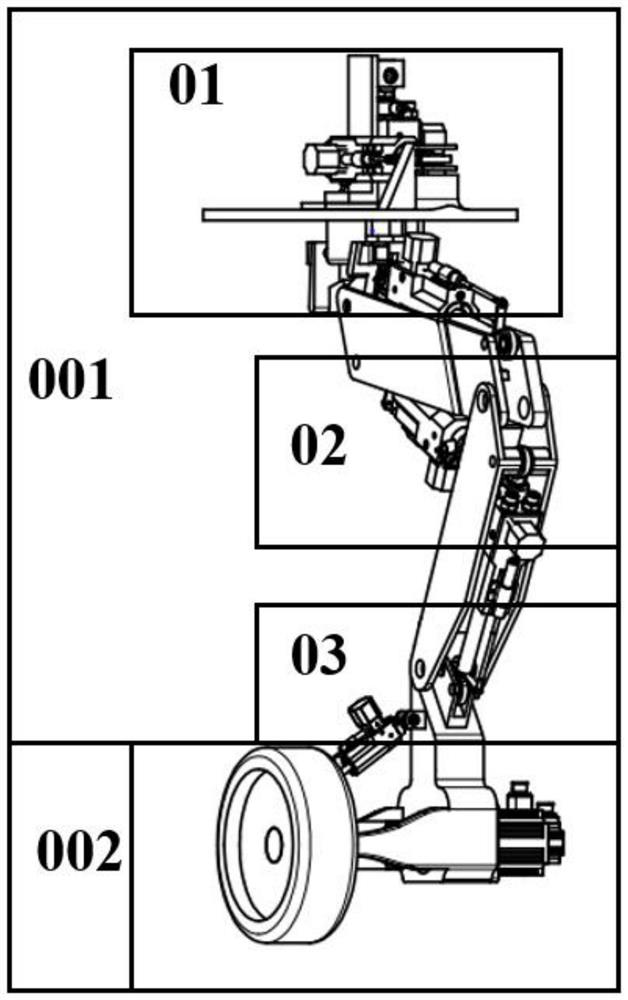
[0037] This embodiment provides a highly flexible seven-degree-of-freedom wheeled robot leg structure driven by hydraulic and servo motor hybrids, such as figure 1 and figure 2 As shown, the leg structure includes two parts: the foot movement system 001 and the wheel movement system 002; the foot movement system 001 can be divided into hip joint 01, knee joint 02 and ankle joint 03 from top to bottom, and adopts hydraulic drive ; as attached figure 1 As shown, the leg structure hip joint 01 has three degrees of freedom, which can realize the yaw motion of the entire foot motion system 001, that is, the leg system, that is, the hip joint yaw degree of freedom 0101, and the yaw motion of the entire leg system That is, to realize the yaw degree of freedom 0102 of the hip joint and the pitch motion of the hip joint 01 is to realize the degree of freedom 0103 of the hip joint pitch. The knee joint 02 has one degree of freedom, which can realize the pitching motion of the knee jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More