

Train electric transmission system semi-physical simulation platform
A semi-physical simulation, electric drive technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as insufficient flexibility, low platform applicability, and inability to achieve closed-loop control, reducing repetitive workloads, The effect of avoiding repeated investment and improving experimental efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
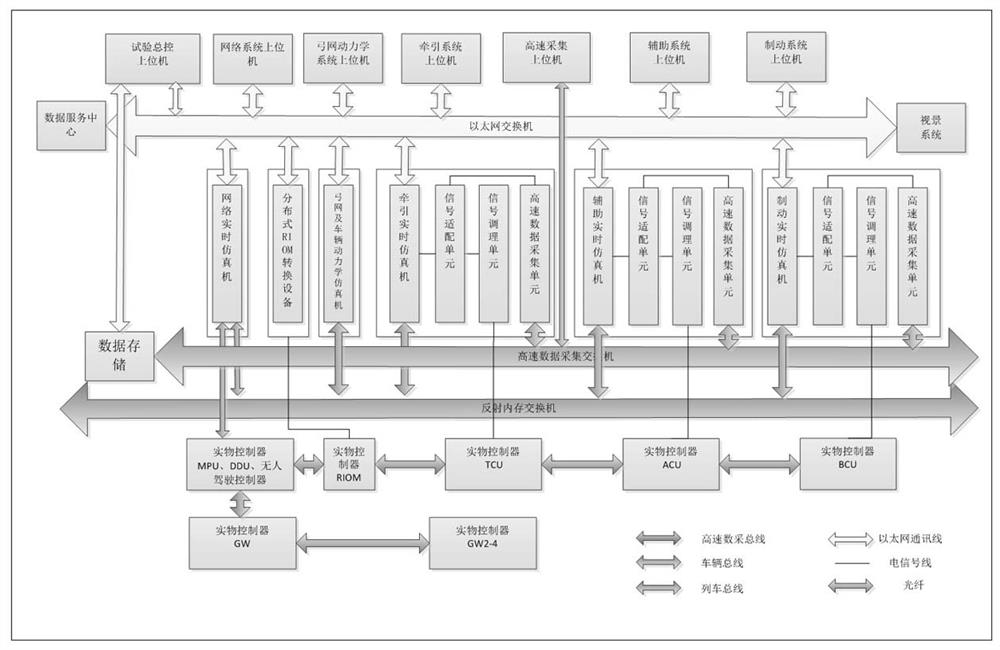
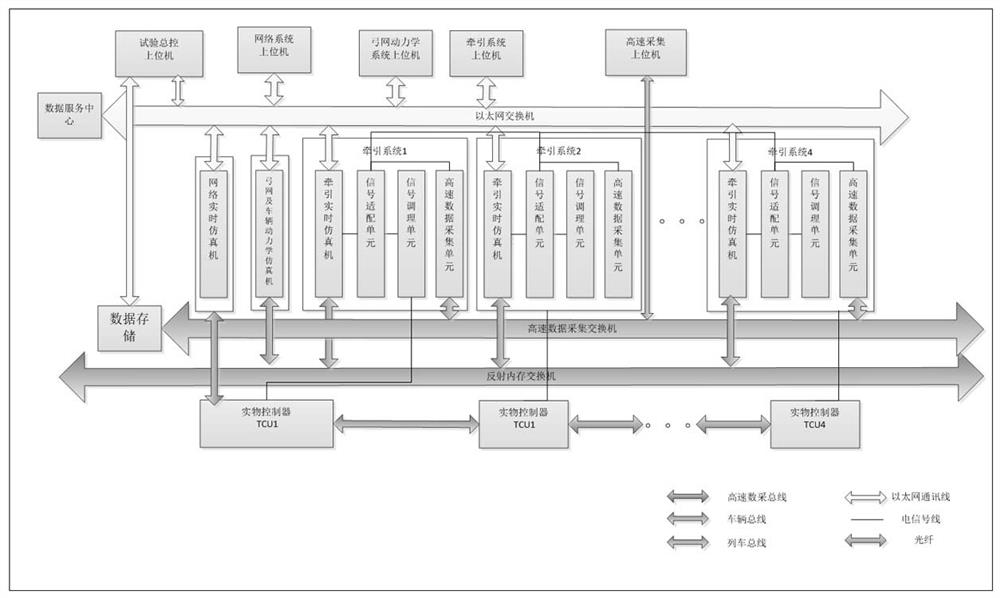
[0050] Multiple simulation requirements for 4-axis electric traction
[0051] System hardware-in-the-loop simulation environment for 4-axle traction of a certain locomotive
[0052] Implementation steps:
[0053] 1. Confirm that the physical controller has 4 TCUs. It is necessary to build a virtual vehicle bus test environment for issuing traction commands. One network real-time simulation machine is required, and RIOM conditioning equipment is not required; a 4-axis traction simulation environment needs to be constructed, and each axis corresponds to One real TCU needs to be configured with 4 sets of traction single-axis software and hardware environments, 4 sets of real-time traction simulators, and 1 real-time simulator of pantograph-catenary and vehicle dynamics.
[0054] 2. Make sure that the network type connected with the network real-time simulator is MVB, and the power supply voltage level is 110V. The network communication board of the network real-time simulator is...
Embodiment 2
[0060] Half-physical simulation environment for the network control system of locomotive single MPU+2GW internal reconnection
[0061] Implementation steps:
[0062] 1. Confirm that the real thing is 1 MPU device and 2 gateways. It is necessary to build an internal reconnection test environment, 2 network real-time simulators, and no RIOM conditioning equipment; the RIOM controller model must be considered when modeling the model.
[0063] 2. Make sure that the network type connected to the network real-time simulator is MVB, the power supply voltage level is 110V, the network communication board of the network real-time simulator is configured as an MVB board, and the MPU is connected to the network real-time simulator 1 with a MVB special cable, and Connect to GW1, connect GW2 to network real-time simulator 2; use WTB special cable to connect between physical gateway GW1 / GW2.
[0064] 3. Through the reflective memory switch, connect the two network real-time simulators to r...
Embodiment 3
[0069] Half-physical simulation environment for network control system of locomotive 2MPU+4RIOM+4GW external reconnection
[0070] Implementation steps:
[0071] 1. Confirm that the physical objects are 2 MPU devices, 4 gateways, 4 RIOMs, and 4 GWs. It is necessary to build an external reconnection test environment, which requires 4 network real-time simulators and 4 RIOM conversion devices. Among them, it is necessary to determine the electrical signal voltage level, number of channels, and channel definition list of each RIOM device, use this as the input condition to design the mapping table of the RIOM signal transfer device, select and match the corresponding voltage level conditioning device, and complete the hardware access of the RIOM device .
[0072] 2. Confirm that the network category of the network with the network real-time simulator is MVB, and the power supply voltage level is 110V. The network communication board of the network real-time simulator is configur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More