

Terminal guidance control method and system of unmanned aerial vehicle
A control method and control system technology, applied in the field of UAV terminal guidance control method and system, can solve problems such as poor realizability, difficult engineering application, complex form, etc., achieve accurate interception of targets, and improve penetration capabilities , the effect of defending against missile attacks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
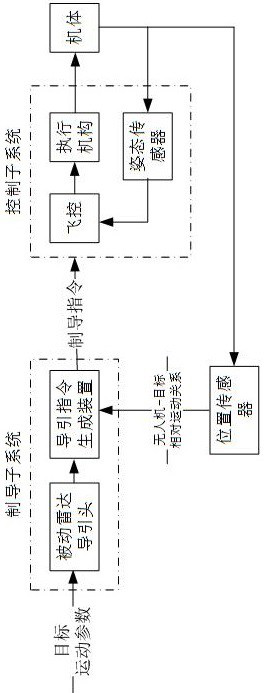
[0056] The embodiment proposes the invention and proposes a terminal guidance control method of UAV, which is based on the terminal guidance control system of UAV, such as Figure 1As shown in, the terminal guidance control is carried out by passive radar guidance; The terminal guidance control system comprises a guidance subsystem, a control subsystem and a position sensor;
[0057] The guidance subsystem comprises a passive radar seeker unit and a guidance command generation device; The control subsystem comprises a flight control unit, an actuator and an attitude sensor; The passive radar seeker unit, the guidance command generation device, the flight control unit and the actuator are connected in turn, and are connected with the body control of the UAV through the actuator; The attitude sensor and position sensor are respectively installed on the body, the attitude sensor is connected with the flight control unit, and the position sensor is connected with the guidance command g...
Embodiment 2
[0068] Based on the above embodiment 1, in order to better realize the invention, the embodiment further Figure 6 As shown in, Figure 6 It is the schematic diagram of the terminal guidance and control system, which combines the input of the seeker and the output of the guidance command. The model is built through Simulink to realize the full digital simulation closed-loop control, so as to analyze the impact of the guidance accuracy. In step 2, the specific operations of forming guidance instructions are as follows:
[0069] Step 2.1: Information Modeling and filtering processing of passive radar seeker;
[0070] Step 2.2: solve the guidance command;
[0071] Step 2.3: estimate the location of the attack target.
[0072] Specifically, the step 1.2 further comprises:
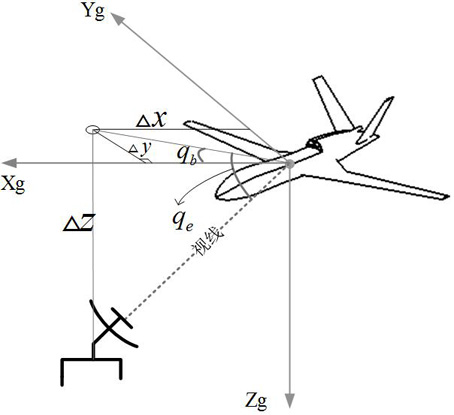
[0073] Step 2.1.1: obtain the aircraft state information through the passive radar seeker and position sensor, calculate the relative motion relationship between UAV and target, and construct the relative motion mode...
Embodiment 3
[0102] On the basis of any one of the above embodiments 1-2, in order to better realize the invention, in step 2.1.4, the filtering module adopts the first-order inertial link low-pass filtering method to process the input line of sight angle with noise, line of sight angle with noise, estimated line of sight angle rate and line of sight angle rate; At the same time, Kalman filter is set to jointly estimate the LOS angle rate and LOS angle rate.
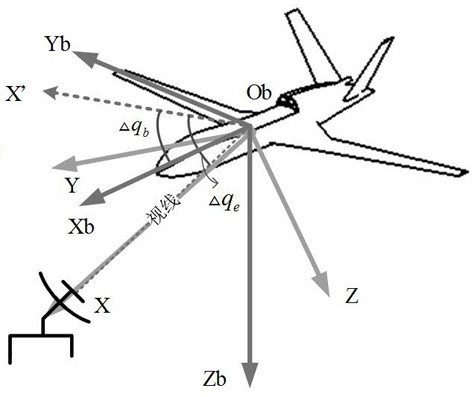
[0103] Working principle: firstly, the line of sight angle of the seeker output relative to the body coordinate system is converted to the inertial coordinate system. Secondly, the line of sight angular rate is calculated in the following way, in which the time interval is taken according to the operation cycle of the control system.
[0104]
[0105] The line of sight angle output by the seeker and the estimated line of sight angle rate are filtered by the first-order inertial link low-pass filter:
[0106]
[0107] Where t 2 Is a tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More