

High-dynamic quadruped robot based on all-joint driving coaxial leg structure module
A quadruped robot and structural module technology, applied in the field of bionic robots, can solve problems such as reducing the inertia of the legs, achieve the effects of convenient motion analysis and control, high compactness, and reduce the difficulty of structural assembly, installation and debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] A high dynamic quadruped robot based on a fully joint-driven coaxial leg structure module proposed by the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings, but the following embodiments are only illustrative, and the protection of the present invention The scope is not limited by these examples.
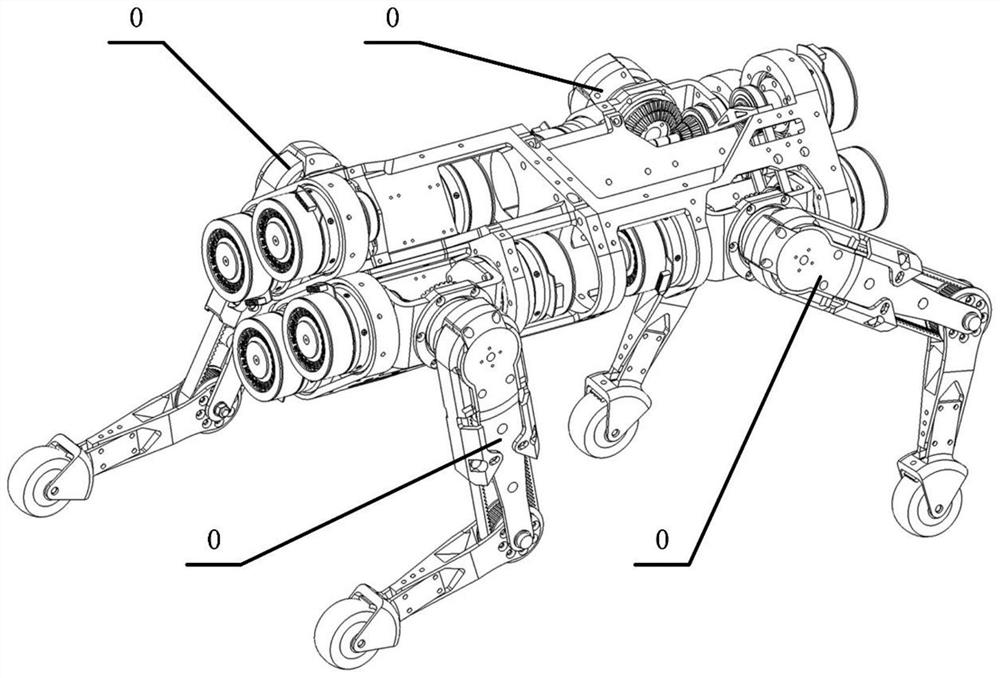
[0076] Such as figure 1 and figure 2 As shown in (a), the highly dynamic quadruped robot consists of four fully joint-driven coaxial leg structure modules 0, which have quadruped locomotion capabilities with high dynamic characteristics.
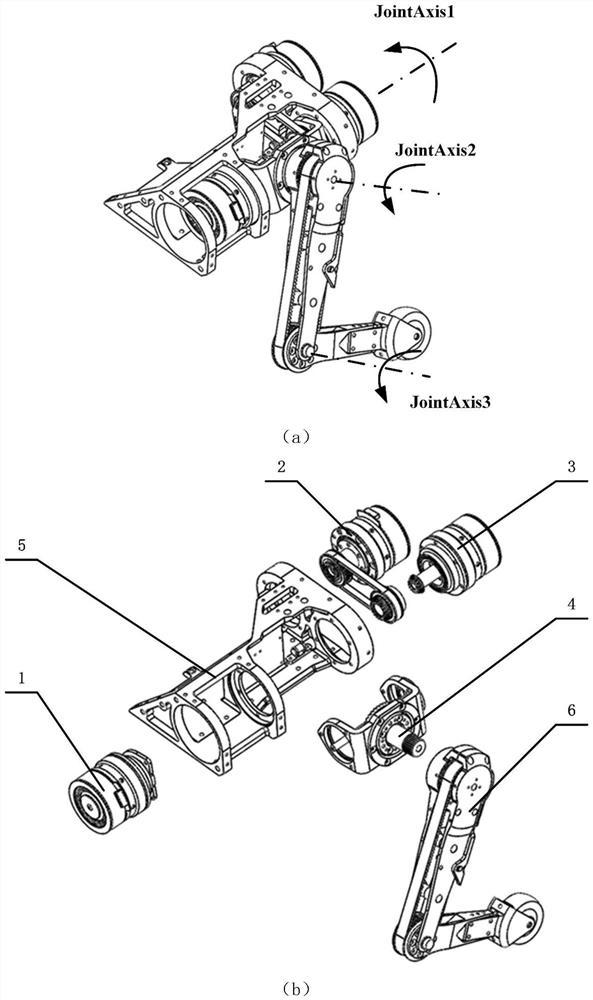
[0077] Such as figure 2 (a) and figure 2 As shown in (b), the full-joint drive coaxial leg structure module 0 includes side swing joint drive unit 1, hip joint drive unit 2, knee joint drive unit 3, power transmission unit 4, single-leg frame 5, leg Limb Unit 6.
[0078] Such as figure 2 As shown in (a), the side swing joint drive unit 1 provides driving power...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More