

Industrial robotic arm for controlling industrial numerical control machine tool
A technology for CNC machine tools and industrial machines, applied in the field of robotic arms, can solve problems such as time-consuming, claw maintenance or replacement process troublesome, and lower overall equipment use efficiency, to achieve the effect of improving use efficiency and shortening operation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
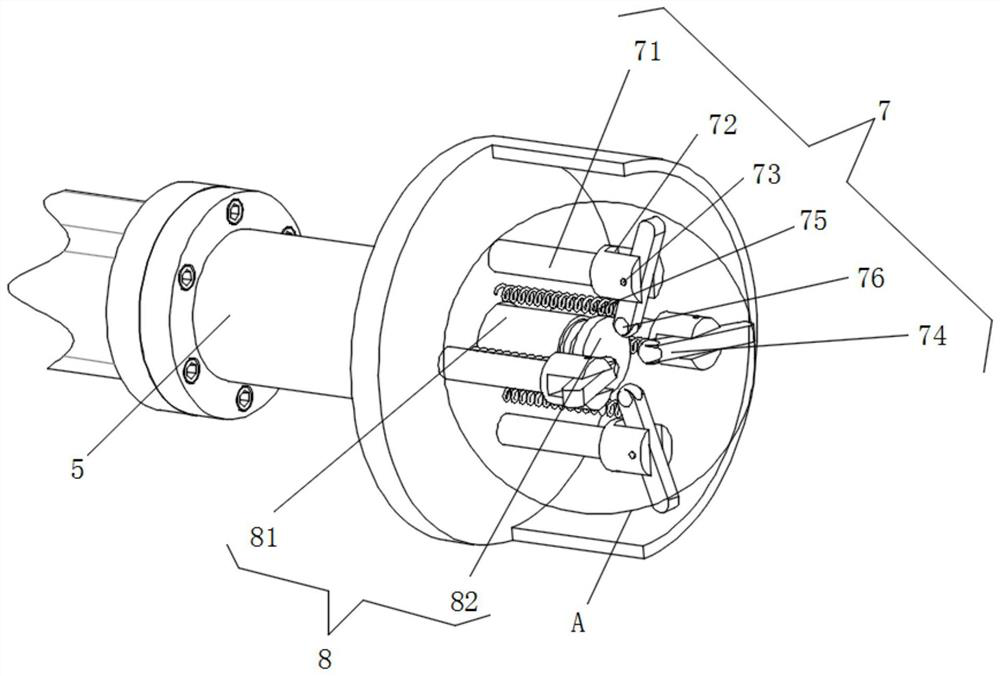
[0033] When it is necessary to provide installation for the jaw, the connection socket 91 set inside the compression support member 91 may first be in the gap between the inner side of the extension sleeve 6 and the clamping member 7, and during the insertion process, in order to avoid the clamping rod 74 interfering with the movement of the connecting socket 91, the clamping lever 74 may be flipped at the beginning of the set of the connecting socket 91, so that the clamping lever 74 is parallel to the extension sleeve 6, the first compression spring 75 at this time is compressed, after the connection socket 91 set to the inside of the extension sleeve 6, Start clamping the electric pushrod 81 inside the power member 81, and then by the electric push rod 81 inside the telescopic rod push magnet top plate 82 for linear movement, and the magnet top plate 82 during the movement will be in contact with the metal sphere 76 inside the clamping member 76 and top pressure, and finally th...
Embodiment 2
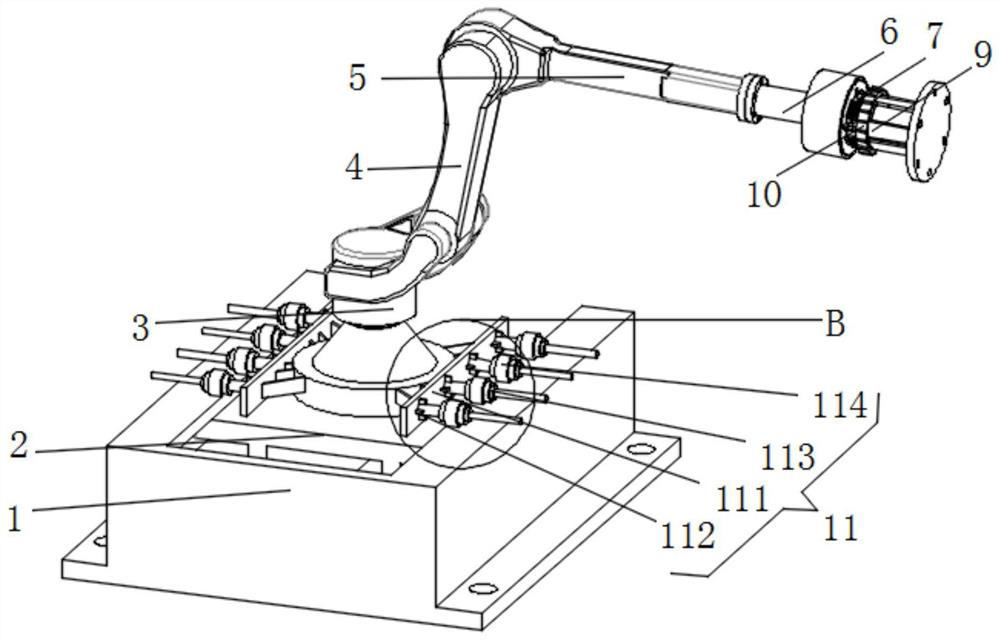
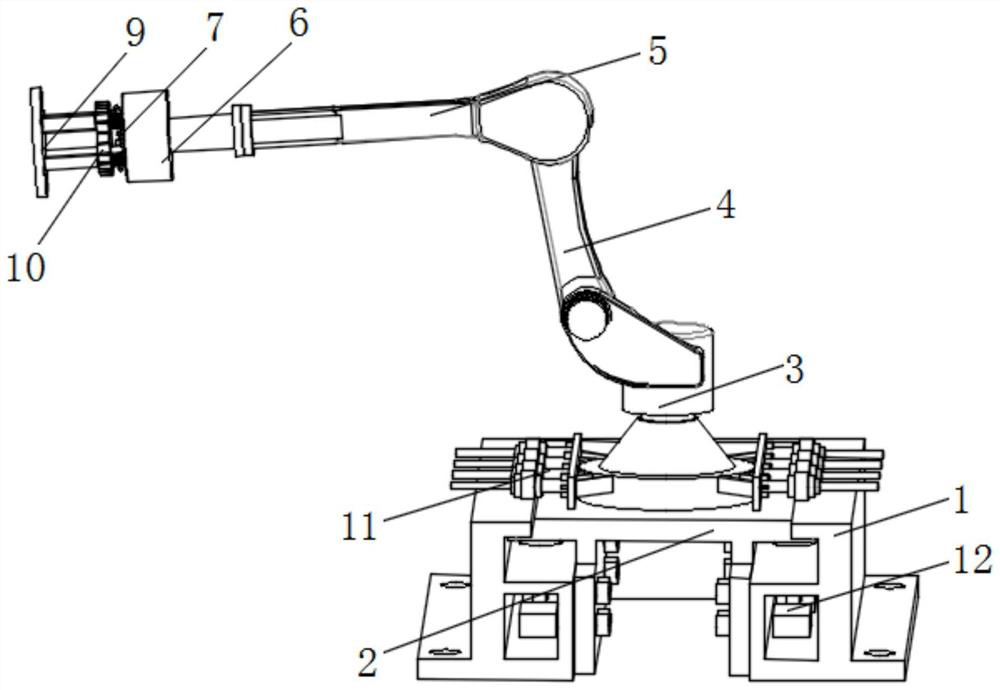
[0035]When the overall equipment in the process of use due to vibration or due to improper operation and impact, at this time the two sets of displacement monitoring mechanism 11 inside the multiple top pressure rod 112 and the pressure sensor 113 between the connection will be displaced intermittently, the specific pressure value change of a plurality of pressure sensors 113 combined to see, reflecting the bottom of the robot arm 3 in the use of the process of displacement changes relative to the original coordinates of the zero point and the specific number of pressure rods 112 and pressure sensor 113 according to the actual use needs set.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More