Method and system for centralized control of multiple SCARA robots
A centralized control and control system technology, applied in the field of robotics, to achieve the effect of reducing investment, simplifying user operation behavior, and enriching teaching methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
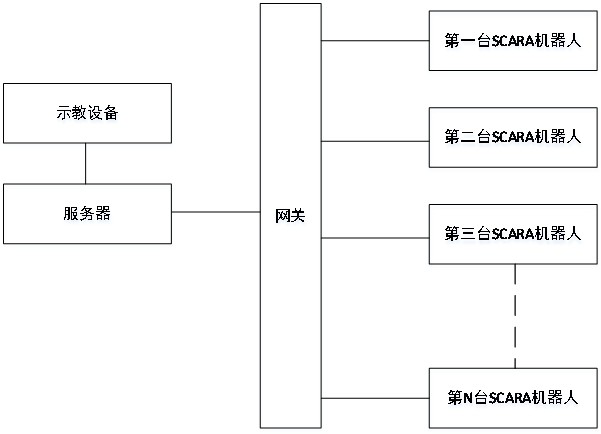
figure 1 A schematic structural diagram of a control system based on a SCARA robot in an embodiment of the present invention is shown. The control system includes: a teaching device, a server, and several SCARA robots, wherein:
A teaching device, used to provide a teaching operation interface and receive teaching data set by the user based on the teaching operation interface, the teaching data including: the hardware parameters of the robot and the teaching operation parameters;
The server is configured to receive the teaching data generated by the teaching device, and based on the teaching data, match the first SCARA robot matching the teaching data from the multiple SCARA robots; based on the teaching data, send the data to the first SCARA robot. A motion controller of a SCARA robot sends motion control information;
A plurality of SCARA robots are used for data communication with the server. When the first SCARA robot in the plurality of SCARA robots receives the motion c...
Embodiment 2
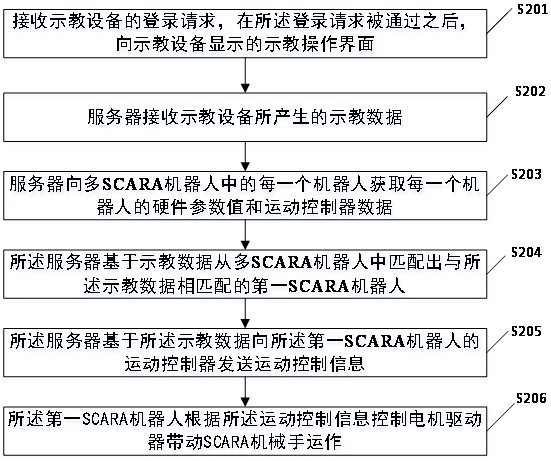
based on figure 1 The shown control system, the method for centrally controlling multiple SCARA robots in the embodiment of the present invention includes: the server receives teaching data generated by the teaching device, and the teaching data includes: robot hardware parameters and teaching operation parameters; The server matches a first SCARA robot matching the teaching data from the multiple SCARA robots based on the teaching data; the server sends the motion to the motion controller of the first SCARA robot based on the teaching data Control information; the first SCARA robot controls the motor driver to drive the SCARA manipulator to operate according to the motion control information.
[0032] specific, figure 2 A flow chart of a method for centrally controlling multiple SCARA robots in an embodiment of the present invention is shown, which specifically includes the following steps:
S201. Receive a login request from a teaching device, and after the login request i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com