

Control system and method based on EtherCAT communication and double-shaft driving control device
A control system and controller technology, applied in the control system, motor speed or torque control, program control manipulator, etc., can solve the problems of complex internal structure of the steering wheel, unfavorable testing and error checking, complex communication control programs, etc. , to achieve synchronous real-time control, high bandwidth utilization, and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
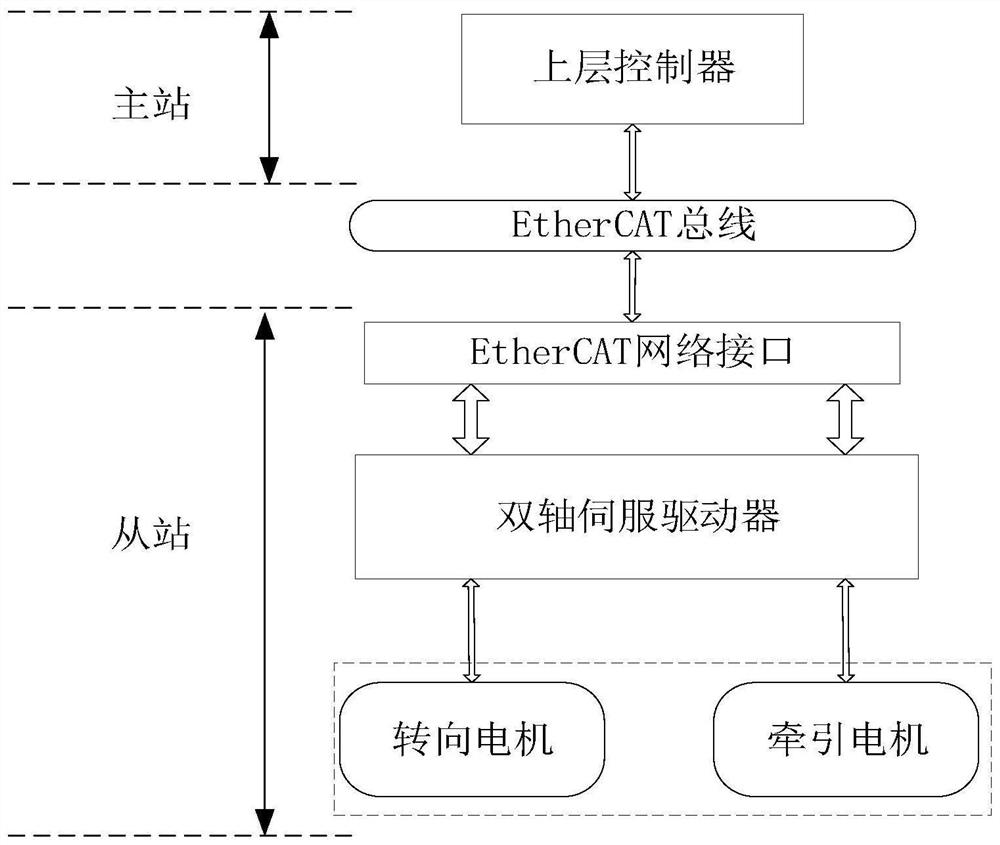
[0039] According to an embodiment of the present invention, a control system based on EtherCAT communication is provided, see figure 1 and figure 2 , including: master station and slave station, data communication between master station and slave station through EtherCAT bus, data includes control instructions;
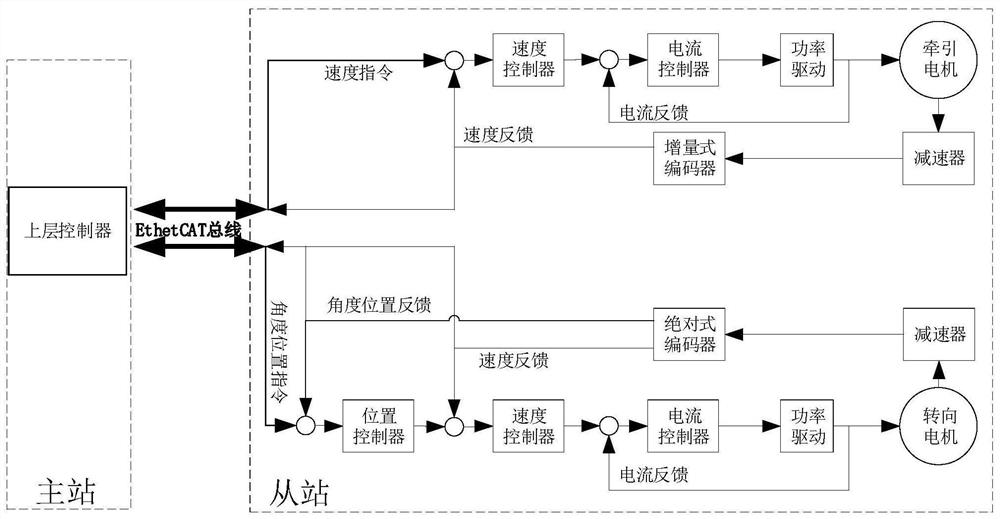
[0040] The master station includes an upper controller, and the upper controller is used to send control commands to the slave stations, and the control commands include speed commands and angular position commands;
[0041] The slave station includes a dual-axis servo driver and a servo motor, and the servo motor includes a steering motor and a traction motor. The dual-axis servo driver receives control commands and controls the traction motor and steering motor to rotate according to the control commands;
[0042] The dual-axis servo driver is also used to collect the speed and angular position of the steering motor and traction motor, and feed back the speed and ...
Embodiment 2
[0053] According to another embodiment of the present invention, a control method based on EtherCAT communication is provided, see image 3 and Figure 4 , including the following steps:
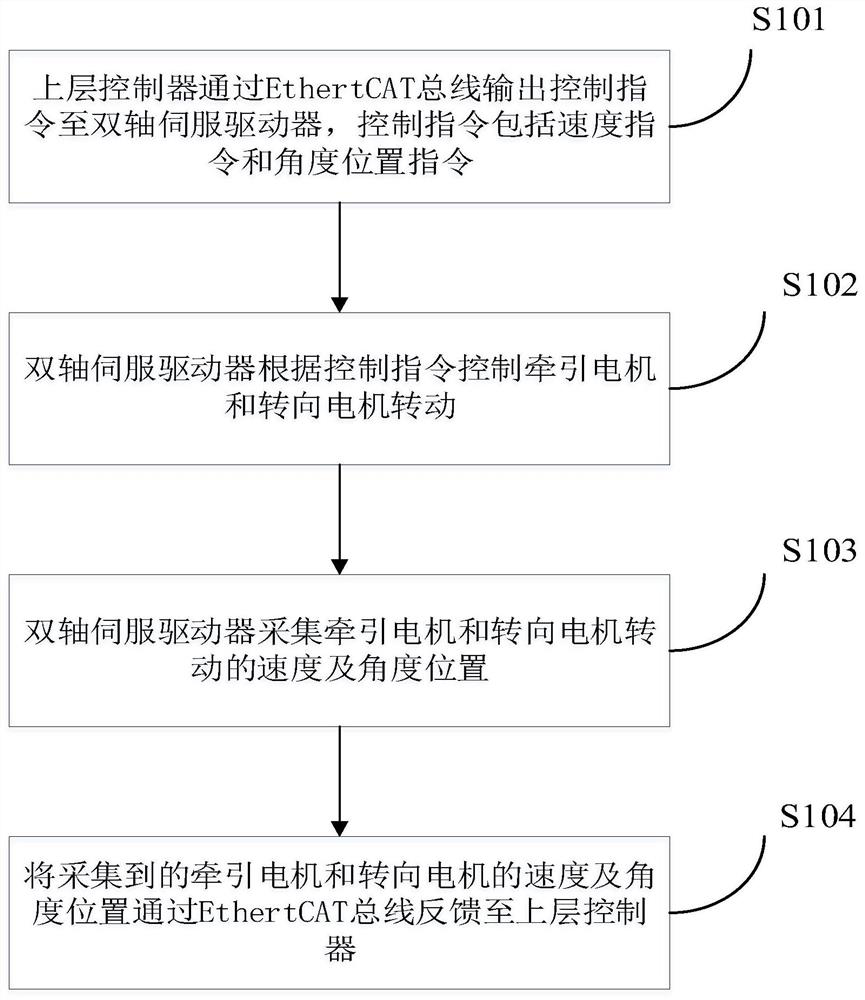
[0054] S101: The upper-level controller outputs control commands to the dual-axis servo driver through the EthertCAT bus, and the control commands include speed commands and angular position commands;
[0055] S102: The dual-axis servo driver controls the rotation of the traction motor and the steering motor according to the control command;
[0056] S103: The double-axis servo driver collects the rotational speed and angular position of the traction motor and the steering motor;
[0057] S104: Feedback the collected speed and angular position of the traction motor and the steering motor to the upper-level controller through the EthertCAT bus.
[0058] In this embodiment, based on EtherCAT, the present invention realizes data communication between the upper-layer controller and the dual-a...
Embodiment 3
[0069] According to another embodiment of the present invention, a dual-axis drive control device is provided, see Figure 5 , including: including: biaxial servo driver 1, steering gear 2, bearing seat 3, steering motor 4 and traction motor 5 distributed in sequence; biaxial servo driver 1 respectively controls the rotation of traction motor 5 and steering motor 4 at the same time; traction motor An incremental encoder for feeding back the rotational speed and angular position of the traction motor 5 is installed on 5 , and an absolute encoder for feeding back the rotational speed and angular position of the steering motor 4 is installed on the steering motor 4 .
[0070] In this embodiment, the driving device in this design includes a traction motor 5 and a steering motor 4; the traction motor 5 adopts an incremental encoder as a feedback device for position and speed, and is installed at the tail of the motor; the steering motor 4 adopts an absolute encoder. As a position f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More