

Multi-degree-of-freedom series-parallel posture-adjusting assembly robot
A robot and degree-of-freedom technology, applied in manipulators, manufacturing tools, etc., can solve problems such as the inability to accurately adjust the attitude of large spacecraft, and achieve the effect of ensuring safety and reliability, and flexible lifting process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to detail the technical content, structural features, achieved objects and effects of the present invention, the following will be described in detail with reference to the accompanying drawings.
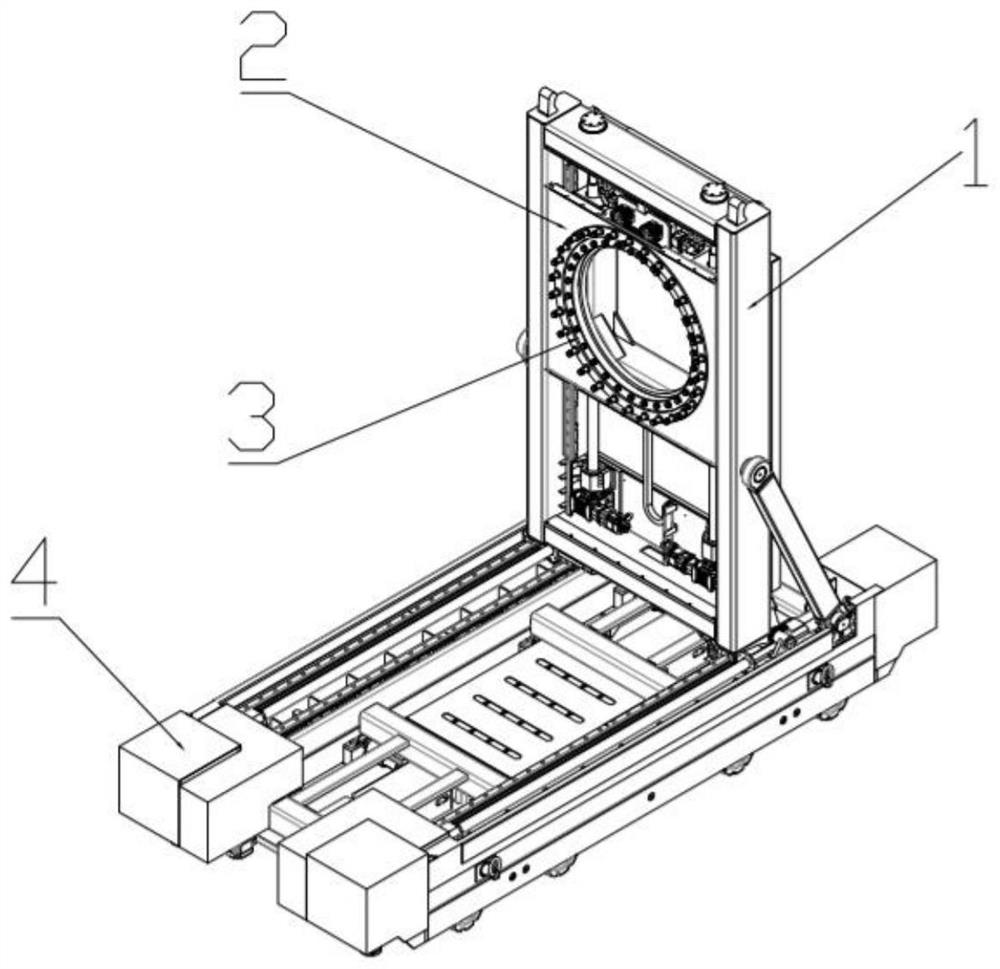
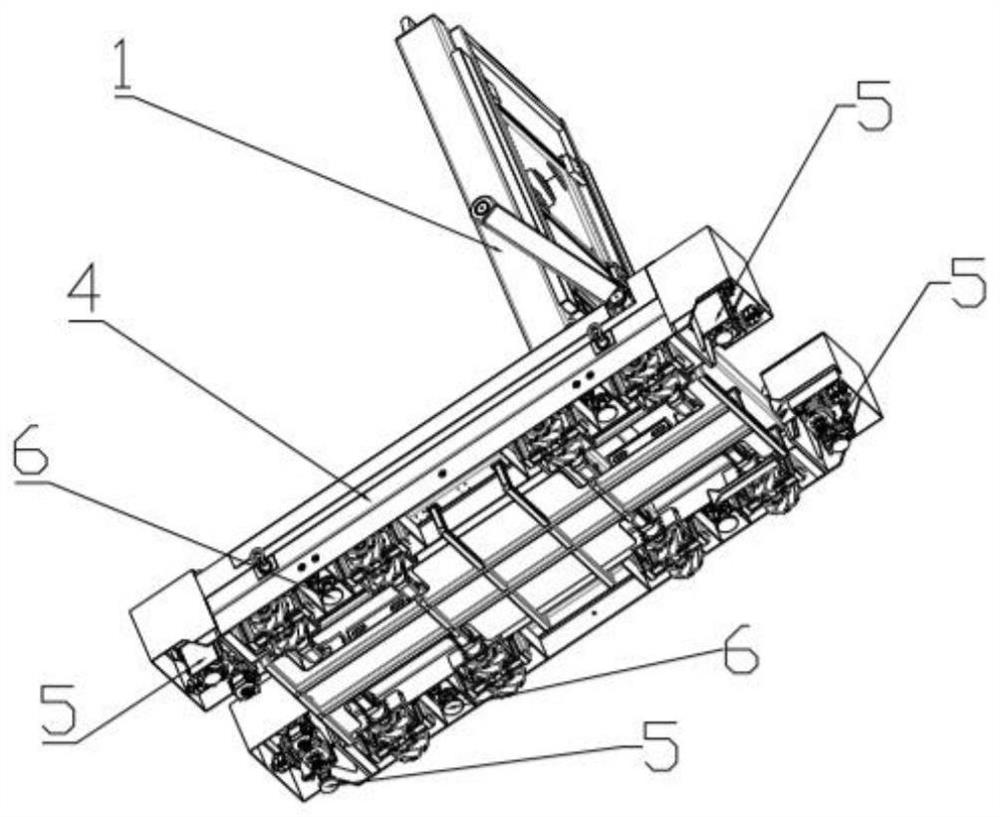
[0035] The present invention provides a multi-degree-of-freedom hybrid attitude-adjusting assembly robot, such as figure 1 and figure 2 As shown, it includes a pitching and tipping module 1 , an azimuth turning module 2 , a lifting module 3 , an omnidirectional moving module 4 , a supporting leg 5 and a supporting and parking module 6 .
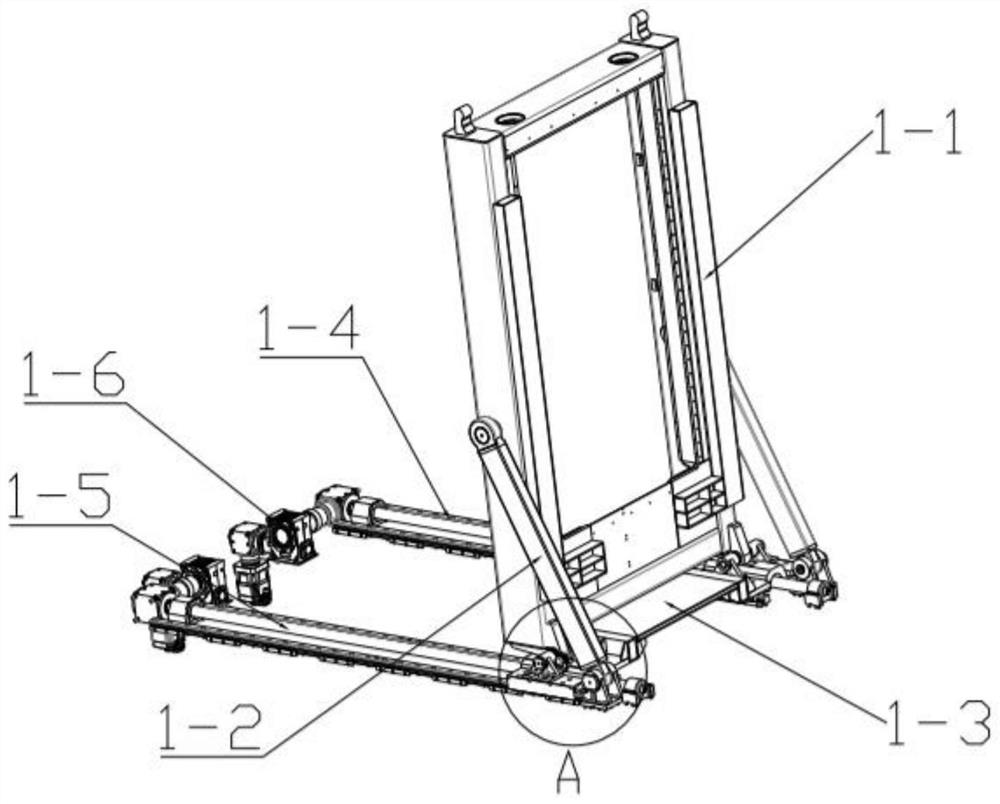
[0036] like image 3 and Figure 4 As shown, the pitching and dumping module 2 is arranged on the omnidirectional moving frame of the omnidirectional moving module 4, and the pitching and dumping module includes a pitching reversing frame 1-1, a pitching support frame 1-2, a pitching sliding table 1-3, a pitching Guide rail 1-4, pitching screw 1-5, pitching motor 1-6, support frame lower support 1-7, pitching slider 1-8 and reve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More