

Flexible exoskeleton walking aid driven by non-external force
A technology of exoskeleton and walking aids, applied in passive exercise equipment, physical therapy, etc., can solve the problems of inconvenient peripherals, high manufacturing cost, poor walking, etc. Low, easy-to-use effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The contents of the present invention will now be discussed with reference to exemplary embodiments, it being understood that the embodiments discussed are only to enable those of ordinary skill in the art to better understand and thus implement the contents of the present invention, and are not intended to imply the scope of the invention any restrictions.
[0036] As used herein, the term "including" and variations thereof are to be read as open-ended terms meaning "including, but not limited to." The term "based on" is to be read as "based at least in part on," and the terms "one embodiment" and "one embodiment" are to be read as "at least one embodiment."
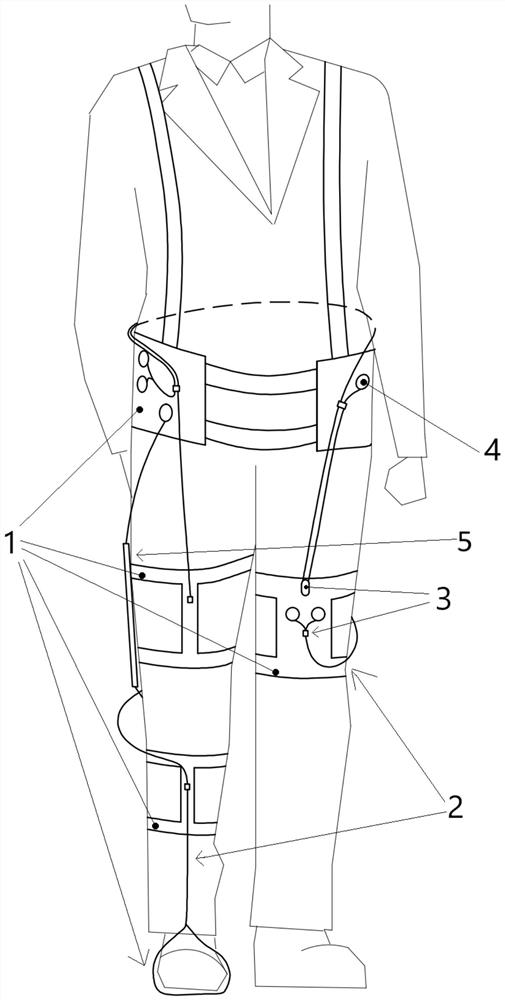
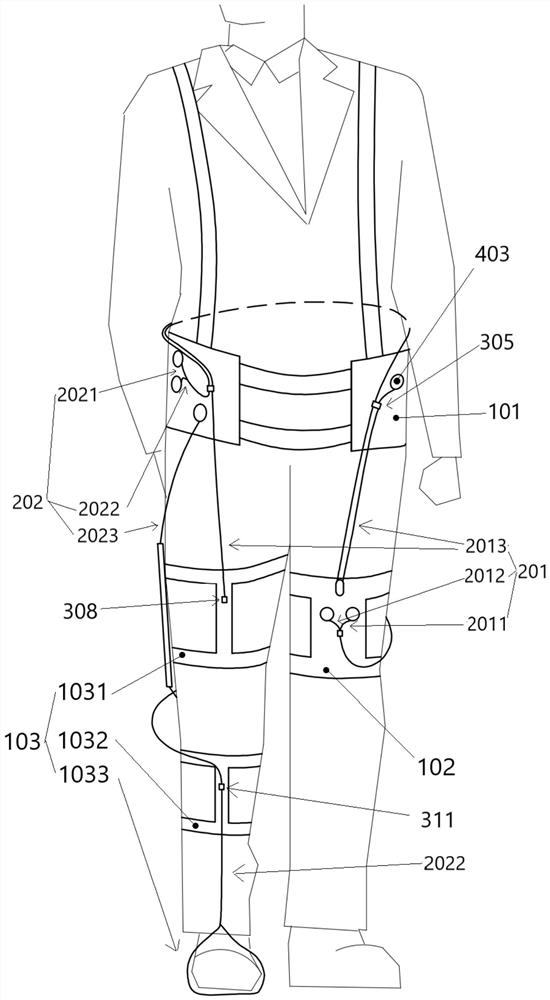
[0037] figure 1 An overall schematic diagram showing a non-external force-driven flexible exoskeleton walker according to an embodiment of the present invention, such as figure 1 As shown, the non-external force-driven flexible exoskeleton walker of the present invention includes: a flexible binding unit 1, a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More