

Weighing method and system for weakening pseudo-range and carrier multipath
A multi-path, carrier technology, applied in the direction of radio wave measurement system, satellite radio beacon positioning system, instruments, etc., can solve the problems that affect the improvement of positioning accuracy, the decrease of positioning accuracy, and the difficulty of accurate elimination, so as to achieve the goal of improving positioning accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
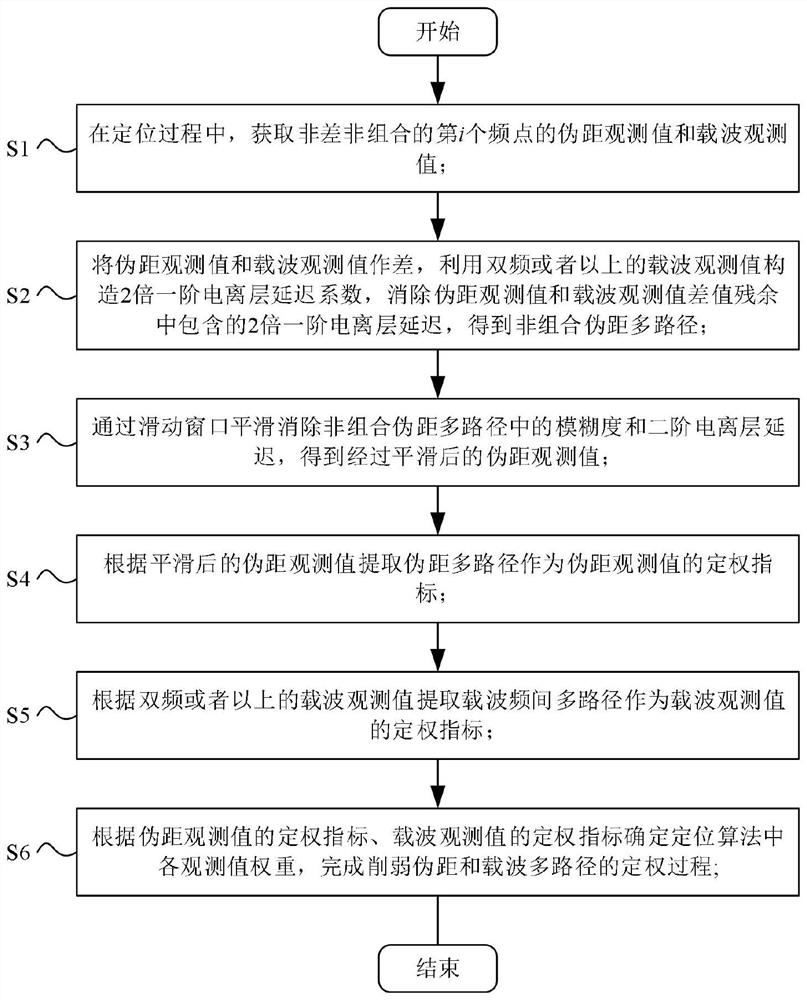
[0094] like figure 1 As shown, a weighting method for weakening pseudorange and carrier multipath includes the following steps:
[0095] S1: During the positioning process, obtain the pseudorange observation value and carrier observation value of the ith frequency point of the non-difference and non-combination;
[0096] S2: Make the difference between the pseudorange observation value and the carrier observation value, use the dual frequency or above carrier observation value to construct a double first-order ionospheric delay coefficient, and eliminate the double frequency contained in the residual of the difference between the pseudorange observation value and the carrier observation value. First-order ionospheric delay to obtain uncombined pseudorange multipath;
[0097] S3: Smoothly eliminate the ambiguity and second-order ionospheric delay in the uncombined pseudorange multipath by sliding window, and obtain the smoothed pseudorange observation value;
[0098] S4: Extr...
Embodiment 2
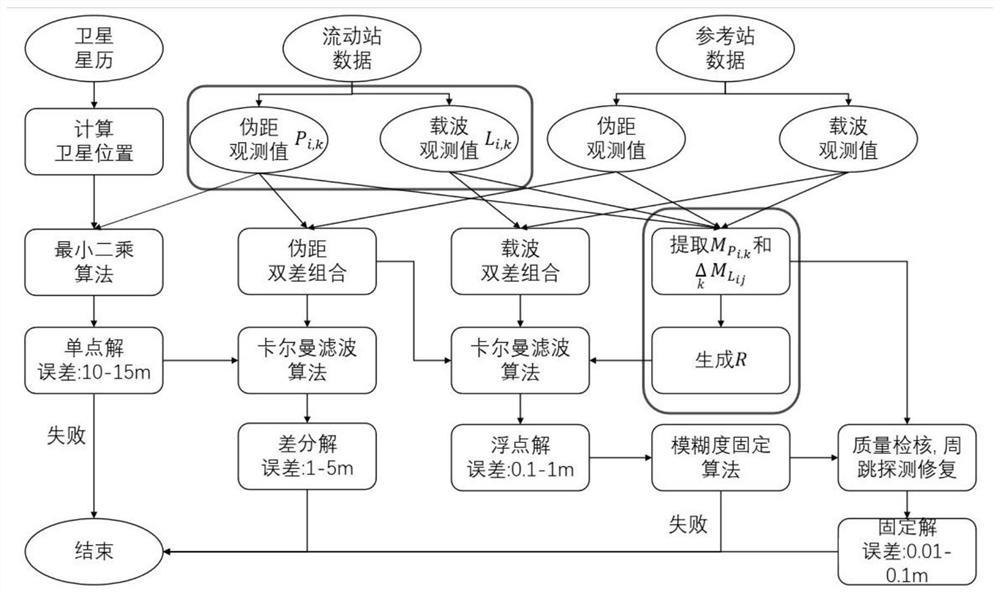
[0131] More specifically, on the basis of Embodiment 1, the positioning algorithm is specifically expressed as:
[0132]
[0133]
[0134]
[0135] Among them, for the kth moment, K k is the gain matrix, H k is the observation model coefficient matrix, is the one-step prediction covariance matrix, is the state covariance matrix, is the one-step prediction state, is the state containing positional parameters, y k is a vector containing pseudorange and carrier observations; Rk It is the observation noise matrix, and it is also the key matrix that the fixed weight index participates in weakening the multi-path error and indirectly affecting the positioning result. Its generation is based on pseudorange noise. and carrier noise as the basis.
[0136] Therefore, in step S6 to complete the weighting process of weakening pseudorange and carrier multipath, the pseudorange multipath index for extracting the i-th frequency point at the k-th time is denoted as: Th...
Embodiment 3
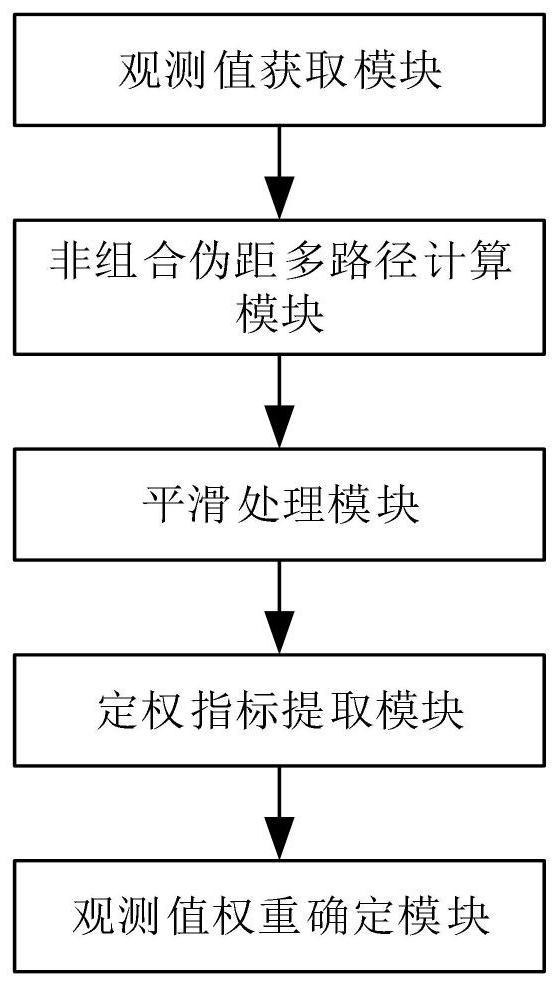
[0140] More specifically, as image 3 As shown, this embodiment provides a weighting system for weakening pseudorange and carrier multipath, which is used to implement a weighting method for weakening pseudorange and carrier multipath, which specifically includes an observation value acquisition module, a non-combined pseudorange multipath Path calculation module, smoothing processing module, fixed weight index extraction module and observation value weight determination module; wherein:
[0141] The observation value obtaining module is used for obtaining the pseudorange observation value and the carrier observation value of the i-th frequency point of the non-difference and non-combination in the positioning process;
[0142] The non-combined pseudorange multipath calculation module is used to make the difference between the pseudorange observation value and the carrier observation value, and use the double frequency or more carrier observation value to construct twice the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More