

Underwate self-navigation platform control system
A control system and platform control technology, applied in three-dimensional position/channel control, etc., can solve problems such as robot loss, and achieve the effect of simple structure, flexible communication protocol, and easy expansion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings.
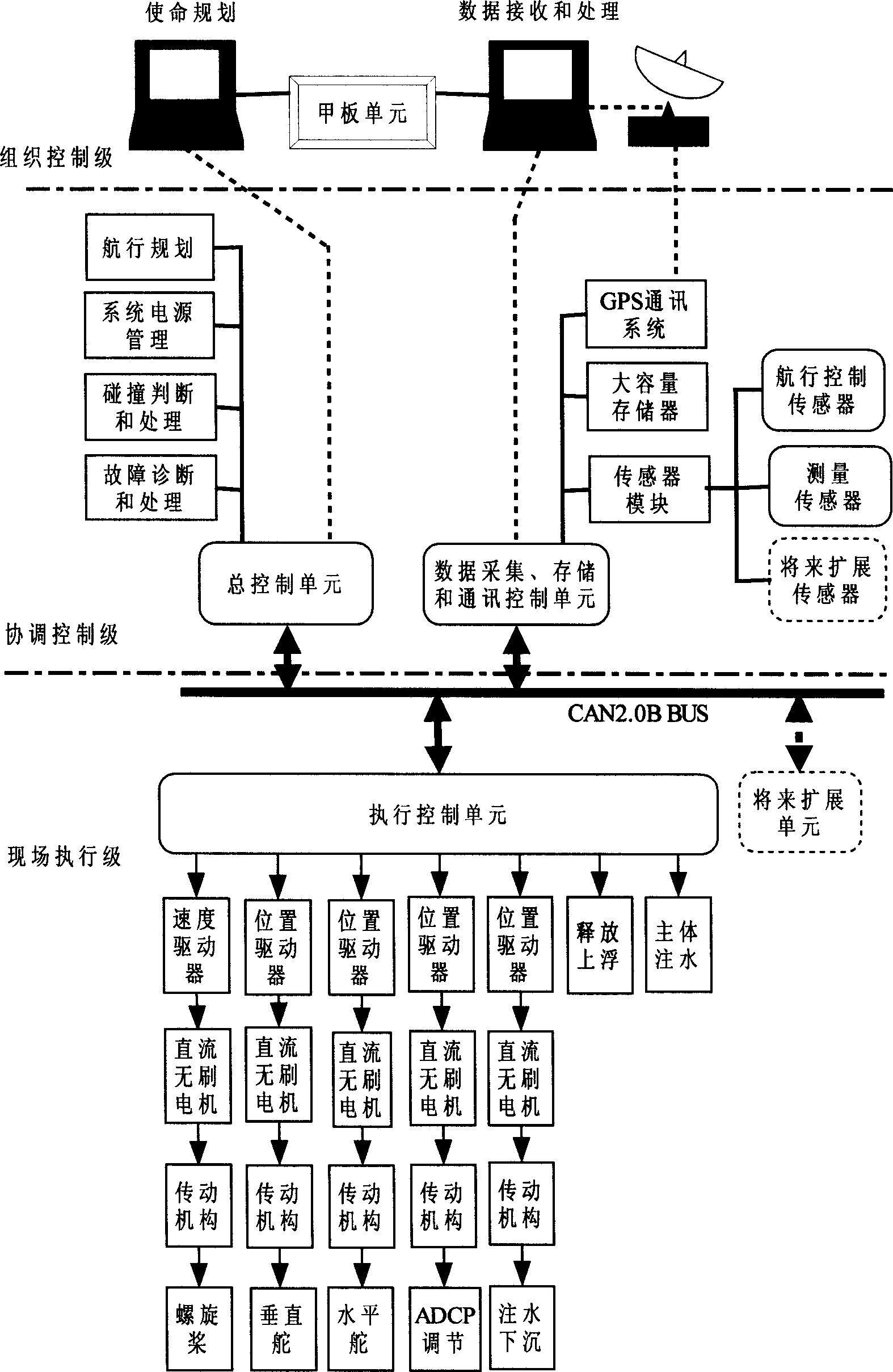
[0032] Overall control architecture of the present invention:
[0033] See figure 1 As shown, the CAN bus commonly used in automobiles is used for underwater self-navigation platforms, and a hybrid control system structure is adopted, which has many advantages such as easy modular design, easy expansion, parallel computing, and fast speed. Each node is hierarchically layered in function, and there are structures such as inclusion and behavior response inside each module. The whole system is a hybrid structure, which avoids the limitations and deficiencies of a single control structure, maximizes strengths and circumvents weaknesses, and the whole system structure is concise and clear. , very suitable for small, low-cost underwater self-navigating platforms. The CAN bus is the Controller Area Network bus; the full name of CAN is Controller Area Network, translated a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More