

System for controlling the position and orientation of an object in dependence on received forces and torques from a user
a technology of receiving force and torque, applied in the direction of programme control, force/torque/work measurement apparatus, instruments, etc., can solve the problems of failure to achieve the effect of robotics investment, difficulty in small and medium-sized enterprises to invest in robotics, and difficulty in programming using joystick and advanced computer programs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
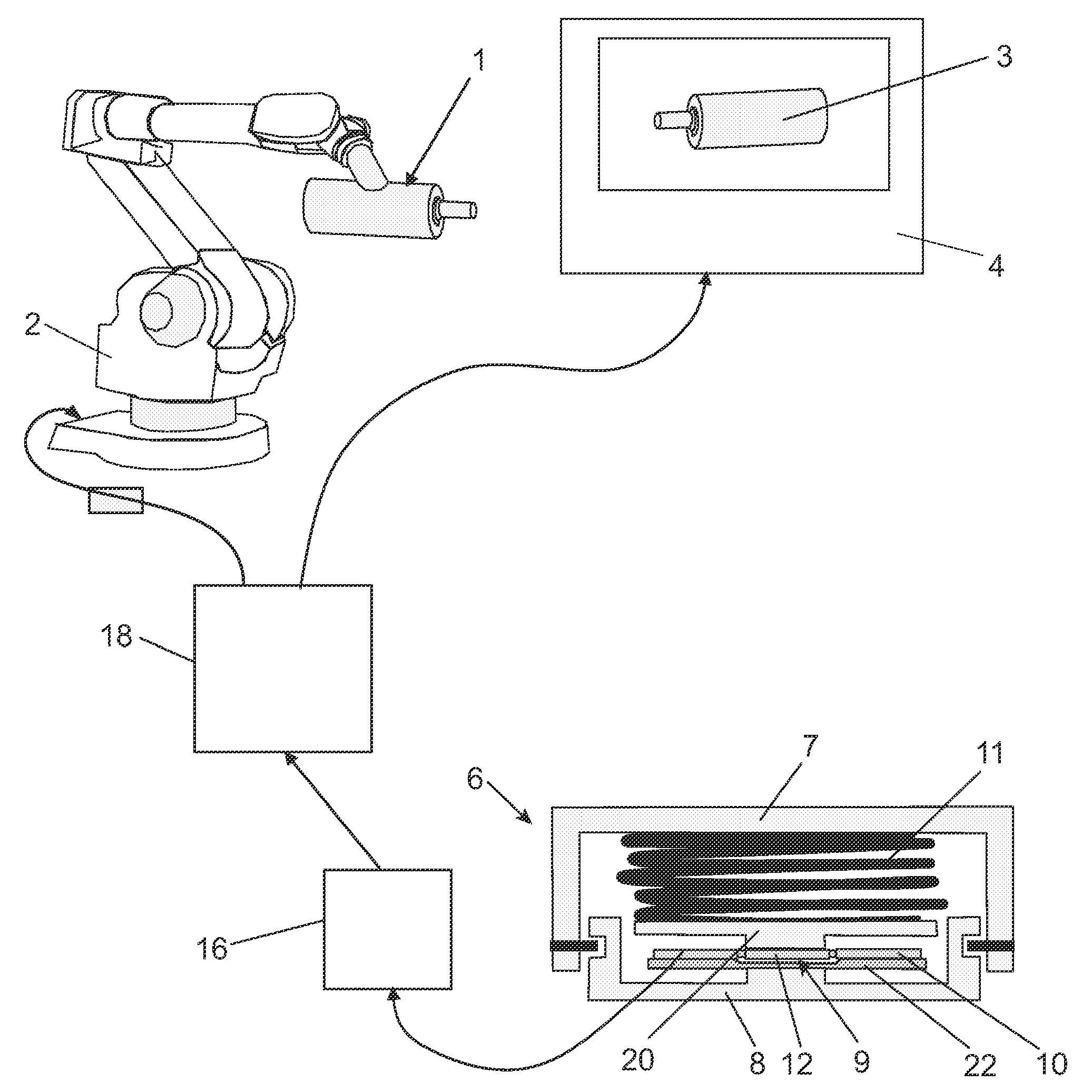
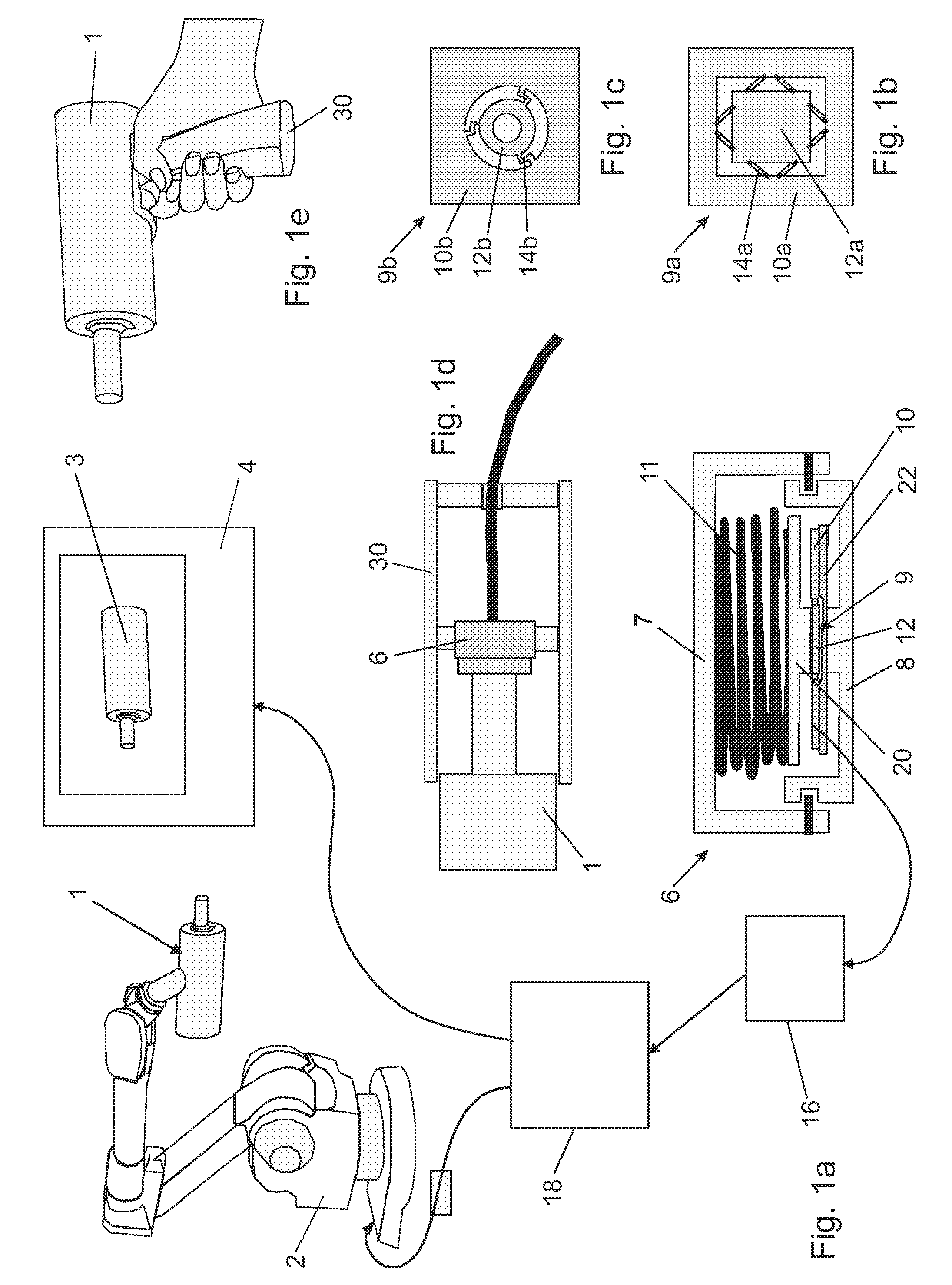
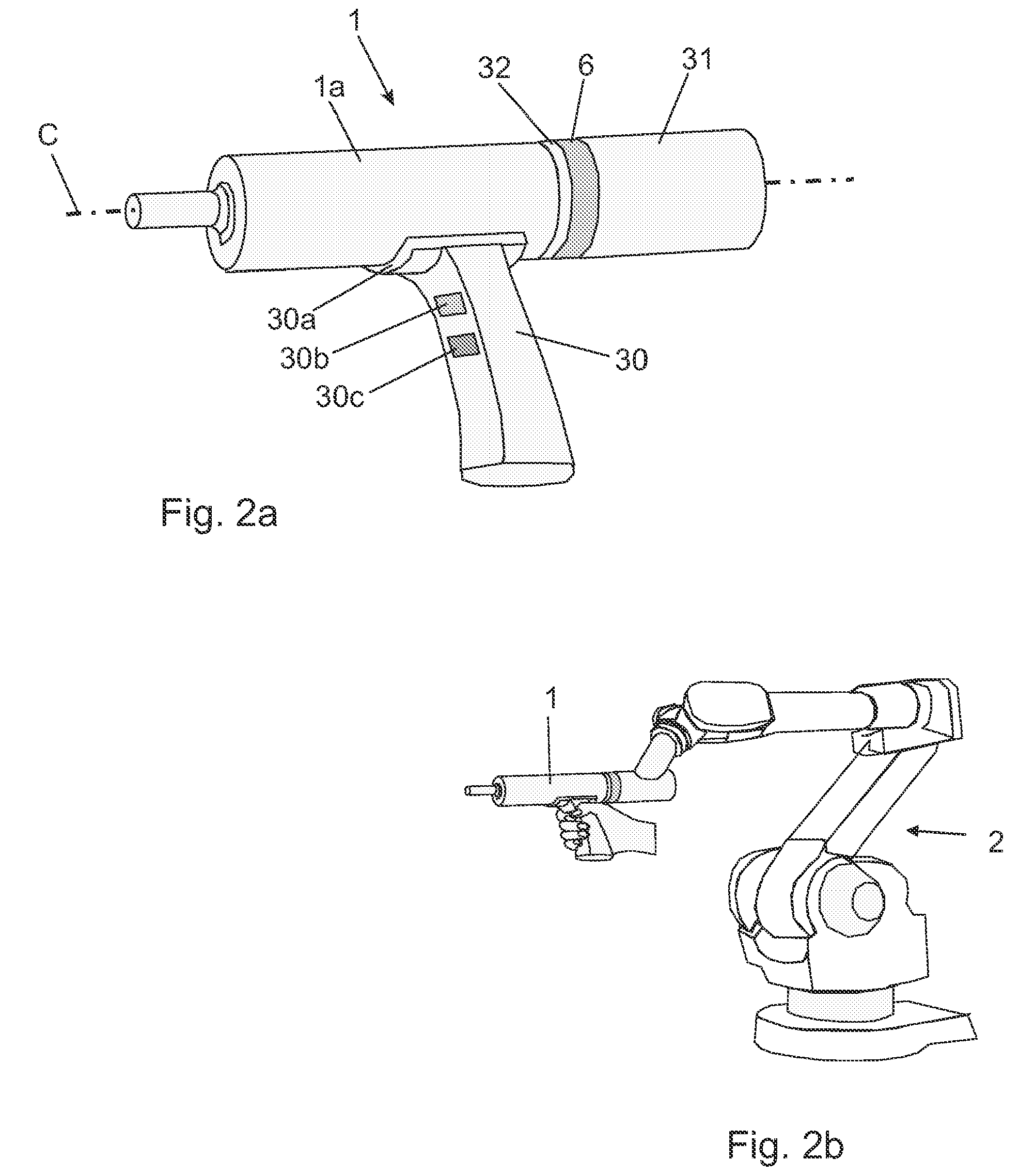
[0096]FIG. 1a shows a system used by a human operator to control the position and orientation of an object, which can be a real object 1 manipulated by a robot 2, or a virtual object 3 displayed on a computer screen 4. The system comprises a measuring assembly 6 for measuring forces and torques, which includes a first part 7, in this example a sensor housing, adapted to receive forces and torques from a human operator, and a second part 8, in this example a sensor flange, wherein the first and second parts are arranged movable relative to each other. The measuring assembly 6 further comprises a sensor unit adapted to measure forces and torques caused by changes in position and orientation of the first part 7 in relation to the second part 8. The sensor comprises a semiconductor sensor chip 9 and measuring electronics 16.
[0097]FIG. 1b shows an example of a semiconductor sensor chip 9a comprising an outer rectangular plate 10a and an inner rectangular plate 12a, which are mechanically...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
| angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More