

Systems and methods for navigation and control of an implant positioning device
a positioning device and computer-aided technology, applied in the field of semi-active surgical robotics, can solve problems such as the loss of implants, the wear and tear of components, and the need for revisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
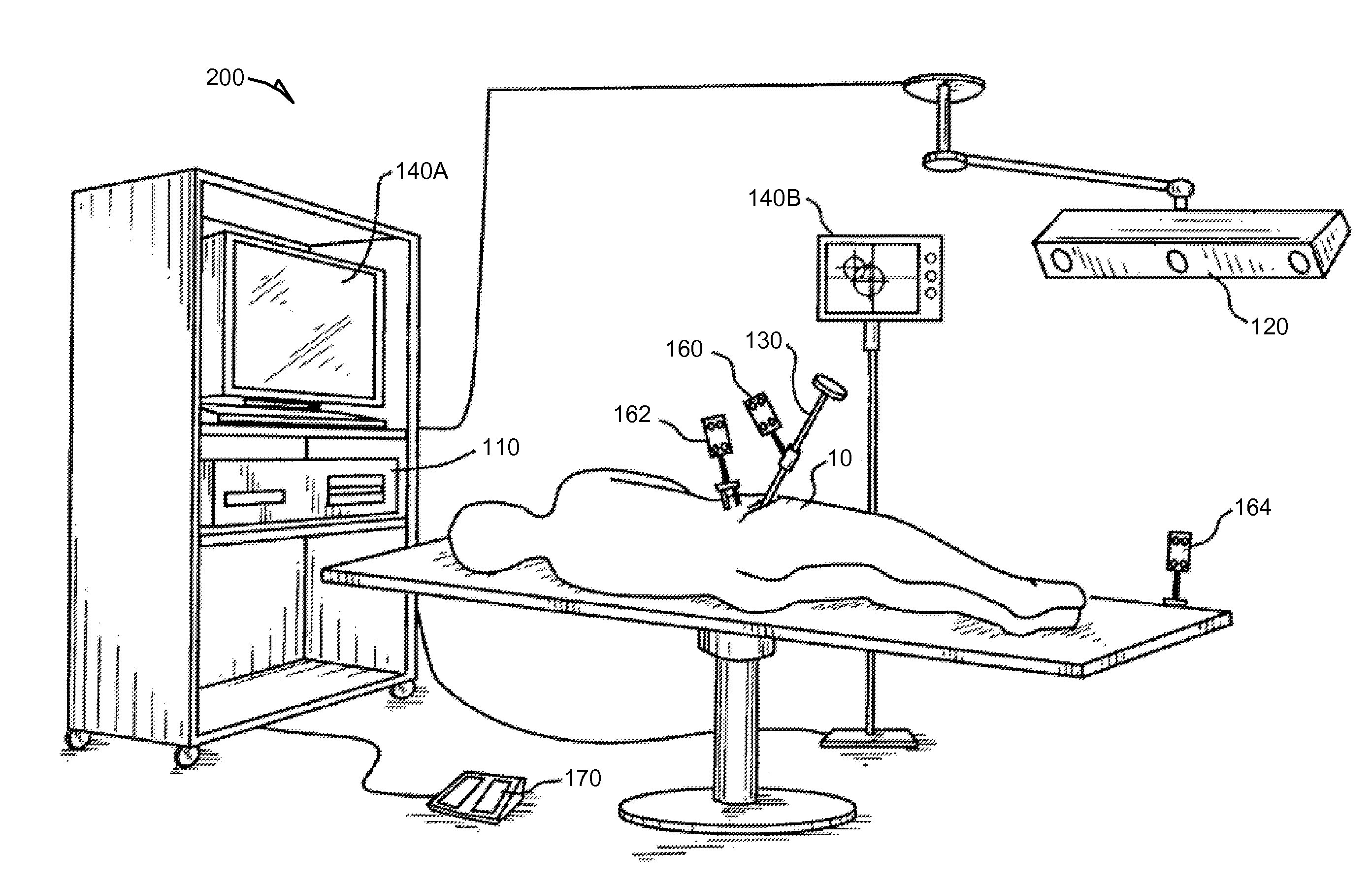
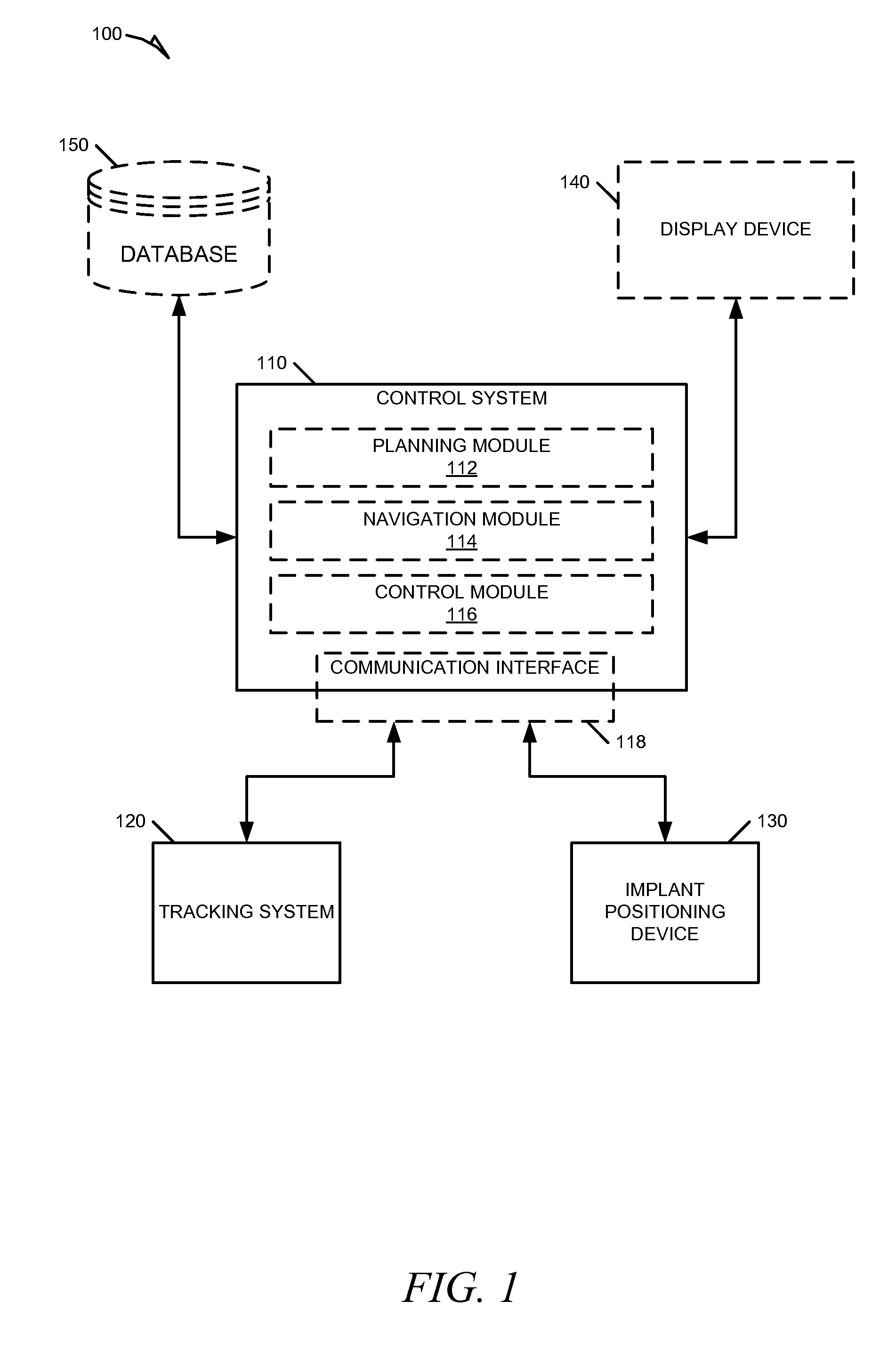
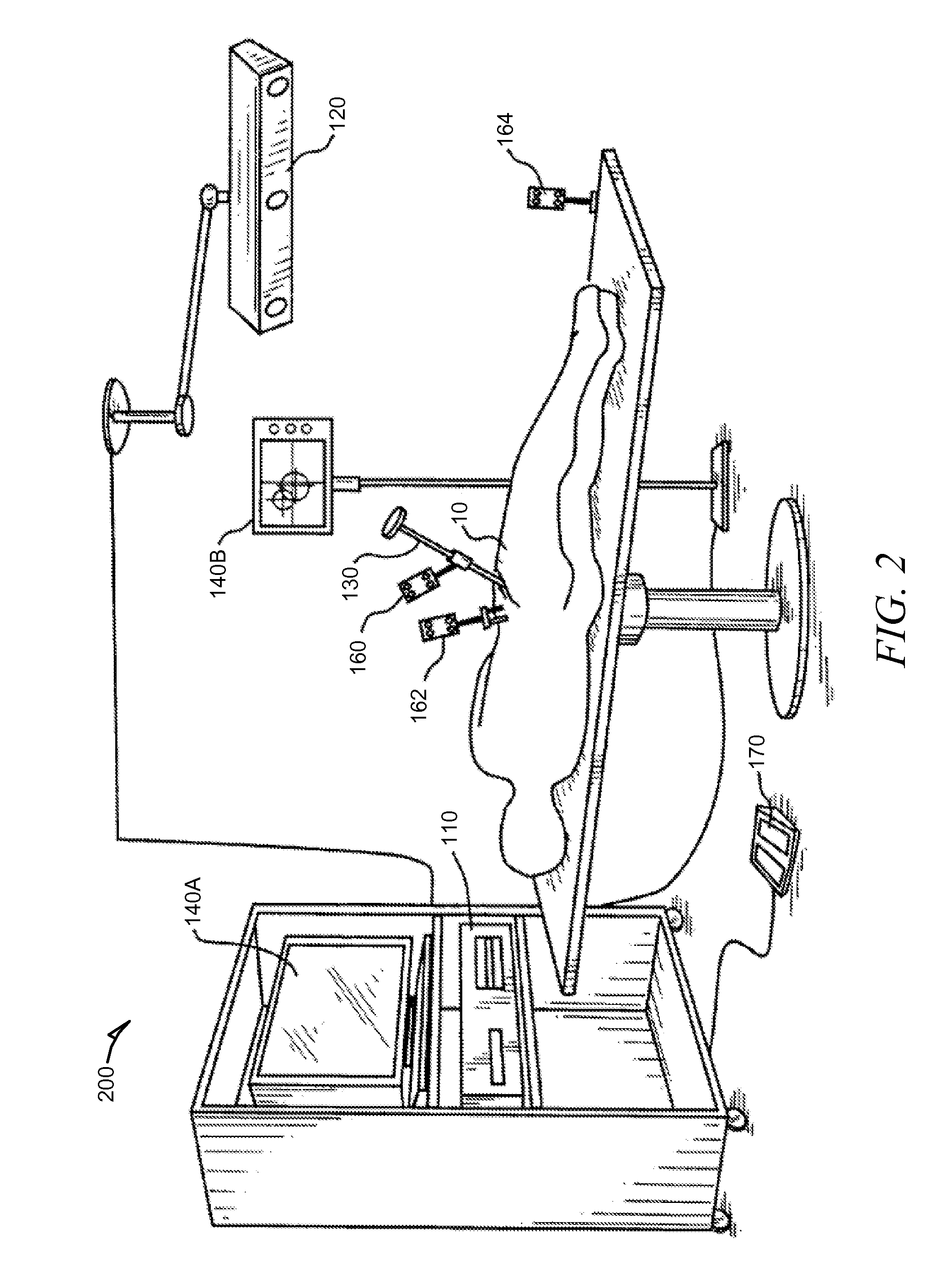
[0035]Example systems and methods for providing and using a navigated and computer controlled implant positioning device are described. In some example embodiments, the systems and methods for computer-aided navigation and control of an implant positioning device can involve a computer-controllable powered impactor. In an example, the computer-controllable powered impactor can be used by a surgeon to insert a prosthetic acetabular cup into the acetabulum of an implant host (e.g., a patient). In other examples, an alternative implant positioning device can be used to assist in a similar arthroplasty procedure, such as a total knee replacement. In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of example embodiments. It will be evident, however, to one skilled in the art, that the present invention may be practiced without these specific details. It will also be evident that a computer contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More