

Autonomous electro-optical framing camera system with constant ground resolution, unmanned airborne vehicle therefor, and methods of use
a camera system and electrooptical technology, applied in the field of autonomous electrooptical framing camera system with constant ground resolution, unmanned airborne vehicle therefor, and methods of use, can solve the problems of rare insufficient supply, unique restrictions on payloads that they carry, and inability to provide just enough,
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
I. Overview and General Discussion
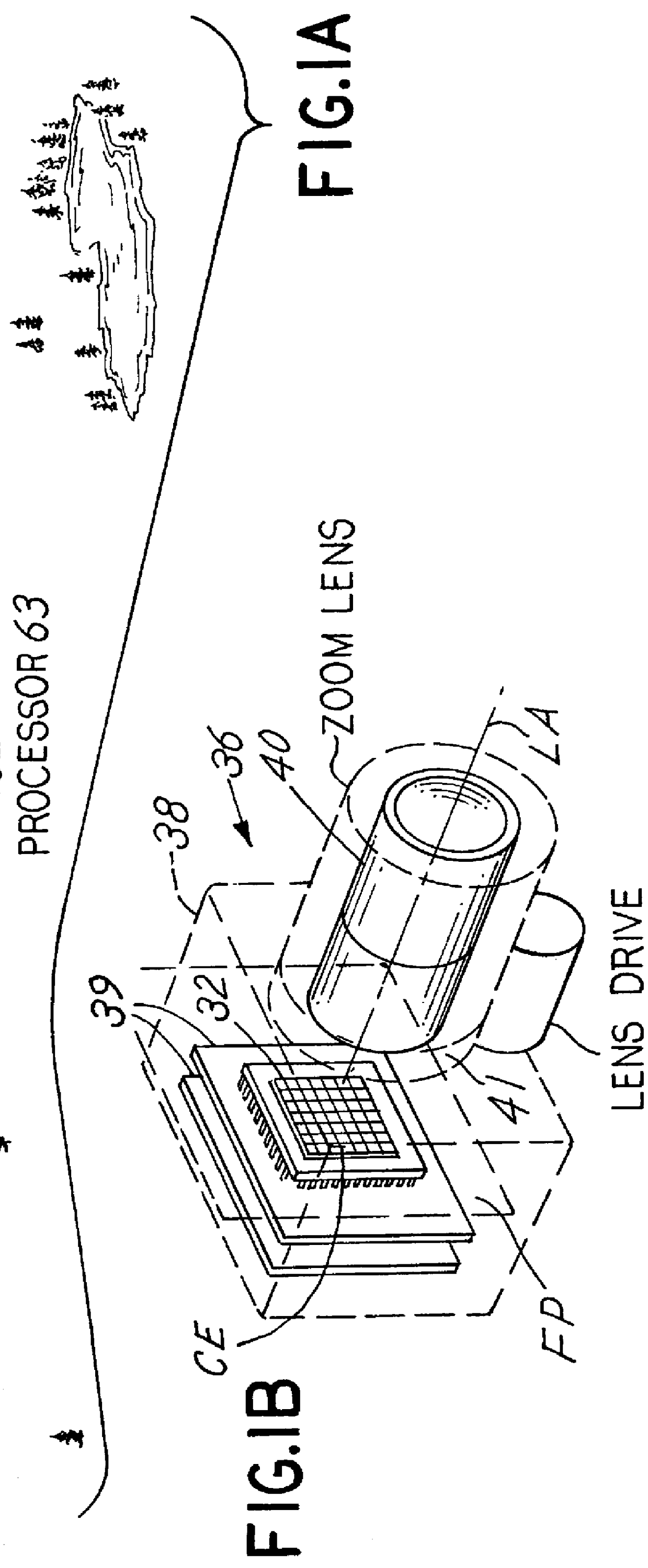
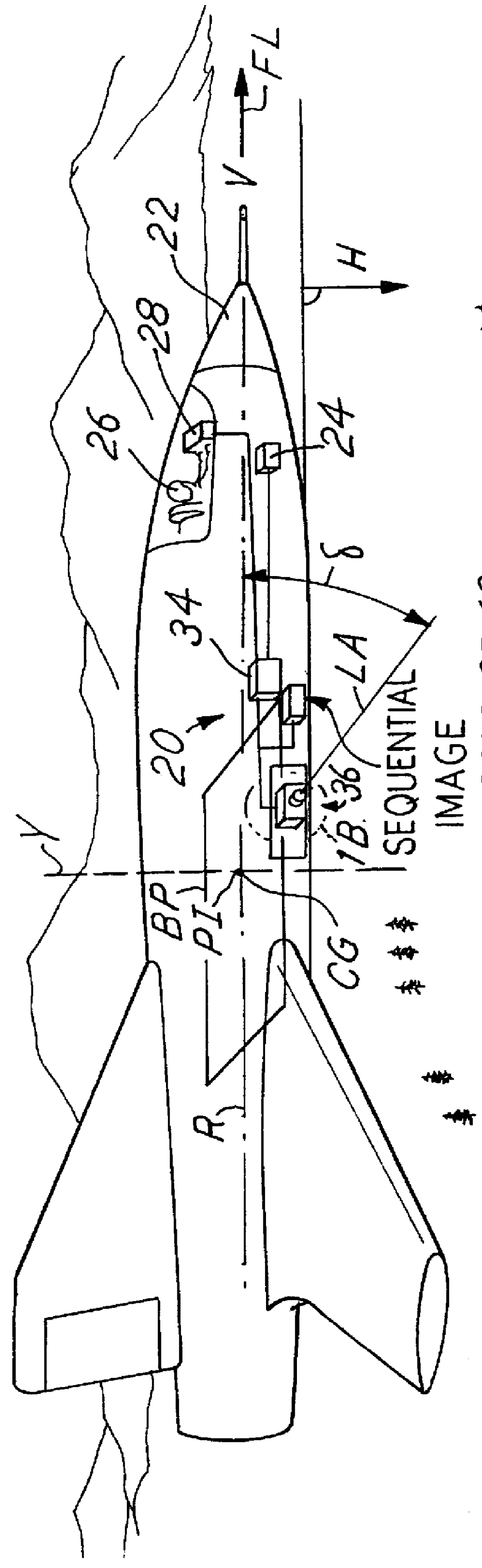
FIG. 1A is an illustration of a reconnaissance aircraft 22 performing a reconnaissance mission. An aerial reconnaissance system 20 including a camera system 36 is installed inside the aircraft 22, and is shown taking a series of frames of imagery in a side oblique orientation. In accordance with one possible embodiment of the invention, the camera system 36 performs calculations of the range to the target from previous frames of imagery. The camera control computer 34 sets the focal length of a zoom lens in the system 36 to yield imagery having a constant ground resolution, field of view or NIIRS objectives in accordance with the techniques described herein. Additionally, the camera system includes an imaging array that performs forward motion compensation. The manner in which forward motion compensation is achieved is not particularly important, and can be by any of several known methods.
The aircraft 22 defines orthogonal roll, pitch and yaw axes R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More